Quadcopter à faire soi-même à partir de matériaux de récupération. Comment assembler un quadricoptère de vos propres mains : instructions pour assembler des quadricoptères et des drones faits maison Quelle batterie est la meilleure pour un quadricoptère
- Didacticiel
J'ai décrit l'ensemble du processus d'assemblage et de configuration, et ci-dessous il y aura une version légèrement modifiée contenant plus d'informations de mes articles précédents.
Je laisse de côté la question de me lancer dans ce passe-temps et je passe directement au quadricoptère.
Choisir une taille de quadricoptère
Il y a un an, les quadricoptères de taille 250 étaient les plus populaires. Mais désormais, les pilotes préfèrent assembler des appareils plus petits, ce qui est très raisonnable : le poids est moindre, mais la puissance est la même. J'ai choisi la taille 180 non pas pour des raisons pratiques, mais comme une sorte de défi d'assemblage.
En fait, cette approche de la sélection n'est pas tout à fait correcte. Il est beaucoup plus raisonnable de choisir d'abord la taille des hélices, puis, en dessous, le plus petit cadre dans lequel s'inséreront les hélices sélectionnées. Et avec cette approche, le format 180 est généralement rejeté. Jugez par vous-même : le format 210 permet d'installer les mêmes hélices de 5 pouces que le 250, tandis que le quad lui-même est plus léger, et les hélices de 4 pouces rentrent dans des cadres de 160. Il s’avère que le format 180ème est un format intermédiaire qui n’est « ni le nôtre ni le vôtre ». Il peut également être considéré comme un 160 pondéré. Mais néanmoins, je l'ai choisi. Peut-être parce que c'est la taille minimale qui permet de transporter plus ou moins confortablement une caméra GoPro ou Runcam.
Accessoires
Commençons par les moteurs. La taille « intermédiaire » des 180, ainsi que la richesse de leur gamme, rendent le choix difficile. D'un côté, vous pouvez prendre ce qui se passe sur les 160, de l'autre, ce qui est installé sur les 210 voire 250. Il faut partir des hélices et des batteries (nombre de canettes). Je ne vois pas l'intérêt d'utiliser une batterie 3S, mais pour les hélices les règles générales sont :
- vous avez besoin d'une poussée statique maximale - augmentez le diamètre de l'hélice et diminuez le pas (dans des limites raisonnables)
- vous avez besoin d'une vitesse élevée - réduisez le diamètre et augmentez le pas (dans des limites raisonnables)
- vous avez besoin d'une poussée élevée avec un petit diamètre - ajoutez le nombre de pales (encore une fois dans des limites raisonnables, car si la différence entre les hélices à deux et trois pales est perceptible, alors entre les hélices à trois et à quatre pales, elle n'est pas si grande)
Dans mon cas, j'ai une limite de taille d'hélice de 4", mais pas de limite de moteur. Cela signifie que la chose la plus intelligente à faire serait d’utiliser des hélices tripales 4045 à nez arrondi. Ils sont difficiles à équilibrer, mais ils rendent les commandes plus réactives et prévisibles, et le son est plus silencieux. D’un autre côté, avec les hélices bipales, la vitesse du quadricoptère est plus élevée, mais je n’en ai certainement pas besoin. « People » utilise les configurations suivantes sur 180 images :
- léger avec moteurs 1306-3100KV, hélices 4045 conventionnelles et batterie 850mAh
- lourd et puissant pour les hélices à nez arrondi à trois pales et une caméra d'action avec des moteurs 2205-2600KV et une batterie 1300mAh
En effet, le châssis permet d'installer des moteurs de 1306-4000KV à 22XX-2700KV. D’ailleurs, je ne sais pas pourquoi, mais les moteurs 1806-2300KV sont désormais en disgrâce et peu utilisés.
Pour mon quad, j'ai pris les moteurs - RCX H2205 2633KV. Premièrement, je voulais avoir une réserve de marche (même si, avec mes modestes compétences de pilotage, on ne sait pas pourquoi). Deuxièmement, mes configurations ne se sont jamais révélées ultra légères et je prévois également d'emporter une caméra d'action. Plus précisément, les moteurs RCX constituent une option de compromis. Ils sont bon marché, mais il y a beaucoup de plaintes concernant la qualité. Au moment de l'achat des composants, il s'agissait de l'un des rares moteurs 2 205-2 600 KV sur le marché. Maintenant (au moment de la rédaction de cet article), l'assortiment est beaucoup plus large et il vaut mieux choisir autre chose.
Avec le reste des composants j'ai agi selon le principe du « plus de challenge » :
Sélection d'un contrôleur de vol
Vous avez peut-être remarqué qu'il n'y a aucun contrôleur de vol sur la liste. Je voudrais décrire son choix plus en détail. Les kits de construction bon marché incluent souvent un contrôleur CC3D, c'est donc peut-être le PC le moins cher. Cela ne sert absolument à rien d’acheter CC3D aujourd’hui. Il est obsolète et ne dispose pas des éléments nécessaires tels que le contrôle de la batterie et un bip. Son successeur, CC3D Revolution, est un produit complètement différent avec de riches capacités, mais aussi un prix supérieur à 40 €.
Les contrôleurs de vol modernes sont déjà passés des processeurs F1 aux processeurs F3, faisant du Naze32 un PC de dernière génération et réduisant considérablement son prix. Il s'agit désormais d'un véritable contrôleur populaire, qui a presque tout ce que votre cœur désire pour un prix à partir de 12 €.
Parmi les PC de nouvelle génération, Seriously Pro Racing F3 est le plus populaire, principalement en raison de la disponibilité de clones bon marché. Le contrôleur lui-même n'est en rien inférieur au Naze32, il dispose en outre d'un processeur F3 rapide, d'une grande quantité de mémoire, de trois ports UART et d'un inverseur intégré pour S.Bus. C'est SPRacingF3 Acro que j'ai choisi. Les autres PC modernes n'ont pas été pris en compte en raison de leur prix ou de certaines fonctionnalités spécifiques (firmware fermé, configuration, etc.)
Par ailleurs, je voudrais souligner la tendance actuellement à la mode consistant à combiner plusieurs planches en une seule. Le plus souvent PC et OSD ou PC et PDB, je ne soutiens pas cette idée à quelques exceptions près. Je ne veux pas avoir à remplacer l'intégralité du contrôleur de vol car l'OSD est grillé. De plus, comme le montre la pratique, une telle union pose parfois des problèmes.
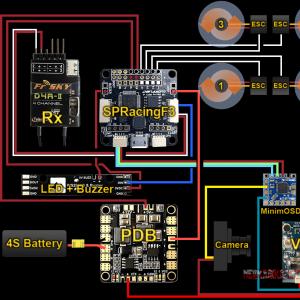
Schéma de câblage
Il est clair que tous les composants nécessitant une alimentation de 5 V ou 12 V la recevront des BEC du tableau de distribution d'alimentation. La caméra pourrait théoriquement être alimentée directement à partir d'une batterie 4S, puisque la tension d'entrée le permet, mais cela ne doit en aucun cas être fait. Premièrement, toutes les caméras sont très sensibles au bruit dans le circuit provenant des régulateurs, ce qui entraînera du bruit dans l'image. Deuxièmement, les régulateurs à freinage actif (comme mes LittleBees), lorsque ce freinage est activé, donnent une impulsion très grave au réseau de bord, ce qui peut griller la caméra. De plus, la présence d'une impulsion dépend directement de l'usure de la batterie. Les nouveaux ne l’ont pas, mais les anciens oui. En voici un éducatif vidéo sur le thème des interférences des régulateurs et comment les filtrer. Il est donc préférable d'alimenter la caméra soit depuis le BEC, soit depuis l'émetteur vidéo.
De plus, dans le but d'améliorer la qualité de l'image, il est recommandé de connecter non seulement le fil de signal, mais également le fil de terre de la caméra à l'OSD. Si vous tordez ces fils en queue de cochon, la terre agit comme un blindage pour le fil de signal. C'est vrai, dans ce cas, je ne l'ai pas fait.
Puisque nous parlons de « masse », les gens se demandent souvent s'il est nécessaire de connecter la « masse » des régulateurs au PC ou si un seul fil de signal suffit. Sur un quadricoptère de course classique, il doit absolument être connecté. Son absence peut entraîner des échecs de synchronisation ( confirmation).
Le schéma de câblage final s'est avéré simple et concis, mais avec quelques nuances :
- alimentation du contrôleur de vol (5V) depuis le PDB via les sorties pour régulateurs
- alimentation du récepteur radio (5V) depuis le PC via le connecteur OI_1
- alimentation de l'émetteur vidéo (12V) de PDB
- alimentation de la caméra (5V) depuis l'émetteur vidéo
- OSD connecté à UART2. Beaucoup de gens utilisent UART1 pour cela, mais comme sur Naze32, ici ce connecteur est mis en parallèle avec USB.
- Vbat est connecté au PC, pas à l'OSD. En théorie, les lectures de tension de la batterie (vbat) peuvent être lues à la fois sur l'OSD et sur le PC en connectant la batterie à l'un ou à l'autre. Quelle est la différence? Dans le premier cas, les relevés seront présents uniquement sur le moniteur ou l'écran des lunettes et le PC n'en saura rien. Dans le second cas, le PC peut surveiller la tension de la batterie, en informer le pilote (par exemple, avec un bip), et également transmettre ces données à l'OSD, à la « boîte noire » et par télémétrie à la télécommande. Il est également plus facile d'ajuster la précision des lectures via un PC. Autrement dit, connecter vbat au contrôleur de vol est de loin préférable.

Assemblée
Tout d’abord, quelques conseils d’assemblée générale :
- Le carbone conduit le courant. Il faut donc que tout soit bien isolé pour que rien ne court au cadre nulle part.
- Tout ce qui dépasse du cadre risque d'être cassé ou arraché en cas d'accident. Dans ce cas, nous parlons avant tout de connecteurs. Les fils peuvent également être coupés par une vis, ils doivent donc également être cachés.
- Après soudure, il est fortement conseillé de recouvrir toutes les cartes avec le vernis isolant PLASTIK 71, en plusieurs couches. D'après ma propre expérience, je dirai qu'appliquer du vernis liquide avec un pinceau est beaucoup plus pratique que de l'appliquer avec un spray.
- Cela ne ferait pas de mal de déposer un peu de colle thermofusible aux endroits où les fils sont soudés aux cartes. Cela protégera la soudure des vibrations.
- Pour tous les raccords filetés, il est conseillé d'utiliser une fixation moyenne Loctite (bleue).
Je préfère commencer le montage par les moteurs et les régulateurs. une bonne vidéo sur l'assemblage d'un petit quadricoptère, à partir de laquelle j'ai repris l'idée de la disposition des fils du moteur.
Par ailleurs, je voudrais parler du montage des régulateurs : où et avec quoi ? Ils peuvent être montés sur la poutre et en dessous. J'ai choisi la première option, car il me semble que dans cette position le régulateur est plus protégé (ce sont mes spéculations, non confirmées par la pratique). De plus, lorsqu'il est monté sur une poutre, le régulateur est parfaitement refroidi par l'air de l'hélice. Parlons maintenant de la façon de sécuriser le régulateur. Il existe de nombreuses façons, la plus populaire étant le ruban adhésif double face + une ou deux attaches zippées. « Pas cher et joyeux », et le démontage ne posera aucune difficulté. Le pire, c'est qu'avec une telle fixation, vous pouvez endommager la carte du régulateur (si vous y mettez un lien) ou les fils (si vous l'attachez dessus). J'ai donc décidé de fixer les régulateurs avec une gaine thermorétractable (25 mm) et de les souder avec les poutres. Il y a un bémol : le régulateur lui-même doit également être en thermorétraction (les miens y ont été vendus) pour que les contacts n'entrent pas en contact avec la fibre de carbone de la poutre, sinon il y aurait un court-circuit.

Il est également judicieux de coller un morceau de ruban adhésif double face au bas de chaque poutre là où le moteur est monté. Premièrement, cela protégera le roulement du moteur de la poussière. Deuxièmement, si pour une raison quelconque l'un des boulons se desserre, il ne tombera pas pendant le vol et ne sera pas perdu.
Lors de l'assemblage du cadre, je n'ai pas utilisé un seul boulon du kit, car ils étaient tous indécemment courts. Au lieu de cela, je l'ai acheté un peu plus long et avec une tête pour tournevis cruciforme (c'est une préférence personnelle).
La caméra ne rentrait pas dans le sens de la largeur entre les plaques latérales du cadre. J'ai légèrement traité les bords de sa planche avec une lime (j'ai plutôt poncé les aspérités) et elle s'est levée sans aucun problème. Mais les difficultés ne s’arrêtent pas là. J'ai beaucoup aimé la qualité du support de caméra de Diatone, mais la caméra avec celui-ci ne rentrait pas dans le cadre en hauteur (d'environ 8 à 10 mm). Au début, j'ai fixé un support sur le côté extérieur (supérieur) de la plaque via un amortisseur en néoprène, mais la conception s'est avérée peu fiable. Plus tard, l'idée de la fixation la plus simple et la plus fiable est venue. J'ai pris seulement une pince de fixation de Diatone et je l'ai mise sur un morceau de tige avec filetage M3. Pour éviter que la caméra ne bouge latéralement, j'ai fixé la pince avec des manchons en nylon.

J'ai vraiment aimé que les seuls connecteurs du PC que je devais souder soient ceux des régulateurs. Les connecteurs à trois broches à part entière ne correspondaient pas à la hauteur, j'ai donc dû recourir à une astuce et utiliser des connecteurs à deux broches. Pour les cinq premiers canaux (4 pour les régulateurs + 1 "juste au cas où"), j'ai soudé les connecteurs au signal et à la masse, pour les trois autres - au plus et à la masse, afin que le PC lui-même puisse être alimenté et à partir de lui - rétroéclairage. Considérant que les clones chinois de contrôleurs de vol souffrent d'une fixation peu fiable du connecteur USB, je l'ai également soudé. Une autre caractéristique du clone SPRacingF3 est le connecteur tweeter. Comme dans le cas de vbat, sur la face supérieure de la carte se trouve un connecteur JST-XH à deux broches et sur la face inférieure, il est dupliqué avec des plages de contact. Le hic, c'est que le clone a une masse constante sur le connecteur et lors de son utilisation, le bip sera toujours activé. La masse de travail normale du tweeter est connectée uniquement au plot de contact. Cela peut être facilement vérifié par un testeur : le « plus » du connecteur est connecté au « plus » de la plage de contact, mais le « moins » n'est pas connecté. Par conséquent, vous devez souder les fils du « bip » sur la face inférieure du PC.

Les connecteurs à trois broches des régulateurs ont également dû être remplacés. Il était possible d'utiliser quatre fiches à deux broches, mais à la place, j'ai pris deux fiches à quatre broches et j'ai inséré la « masse » de tous les régulateurs dans une et le fil de signal dans la seconde (en respectant l'ordre de connexion des moteurs).

La plaque rétroéclairée est plus large que le cadre et dépasse sur les côtés. Le seul endroit où les hélices ne le renverseront pas est sous le châssis. J'ai dû faire de l'agriculture collective : j'ai pris de longs boulons, j'y ai mis des raccords en nylon avec des fentes préfabriquées (afin que les attaches fixant l'éclairage puissent être fixées) et je les ai vissés à travers la plaque inférieure dans les poteaux du cadre. J'ai utilisé des attaches zippées pour fixer une plaque avec des LED aux pieds résultants (les trous dans la plaque s'ajustent parfaitement) et j'ai rempli les attaches avec de la colle chaude. J'ai soudé les connecteurs à l'arrière de la plaque.
Après l'assemblage, au stade de la configuration, il est devenu évident que quelque chose n'allait pas avec le tweeter. Immédiatement après avoir connecté la batterie, elle a commencé à grincer de manière monotone, et si vous l'activiez à partir de la télécommande, ce grincement monotone se superposait à un grincement rythmique. Au début, j'ai commis une erreur sur le PC, mais après avoir mesuré la tension avec un multimètre, il est devenu clair où se trouvait exactement le problème. En fait, il était possible dès le début de connecter une LED ordinaire aux fils du tweeter. En conséquence, j'ai commandé plusieurs tweeters à la fois, je les ai écoutés et j'ai installé le plus fort.


Souvent, le PDB et le contrôleur sont fixés au cadre avec des boulons en nylon, mais je ne fais pas confiance à leur solidité. J'ai donc utilisé des boulons métalliques de 20 mm et des raccords en nylon. Après avoir installé le PDB, j'ai soudé l'alimentation aux régulateurs (le reste des fils a été soudé au préalable) et rempli les zones de soudure avec de la colle chaude. J'ai fixé le fil d'alimentation principal allant à la batterie au cadre avec une attache afin qu'il ne soit pas arraché en cas d'accident.

J'ai retiré tous les connecteurs du récepteur avec une pince coupante, à l'exception des trois requis, et j'ai soudé le cavalier entre les troisième et quatrième canaux directement sur la carte. Comme je l'ai écrit plus haut, il serait plus sage de prendre un récepteur sans connectique. J'ai également déballé ses antennes et les ai thermorétractées. Sur le cadre, le récepteur s'insère parfaitement entre le PBD et le porte-bagages arrière. Avec cette disposition, ses indicateurs sont clairement visibles et il y a accès au bouton de liaison.

J'ai fixé l'émetteur vidéo avec des attaches zippées et de la colle chaude sur la plaque supérieure du cadre afin que, par la fente, il y ait accès au bouton de commutation de canal et aux indicateurs LED.

Il y a un trou spécial dans le cadre pour le montage de l'antenne de l'émetteur vidéo. Mais vous ne devez pas le connecter directement à l'émetteur. Il s'agit d'une sorte de levier, où un bras est l'antenne, l'autre est l'émetteur lui-même avec tous les fils, et l'endroit où le connecteur est fixé sera le point d'appui, qui supportera la charge maximale. Ainsi, en cas d'accident, avec une probabilité de près de 100 %, le connecteur de la carte émetteur se cassera. Par conséquent, vous devez fixer l’antenne via une sorte d’adaptateur ou de rallonge.
J'ai décidé de souder les connecteurs à MinimOSD plutôt que de souder les fils directement. Ils écrivent sur les forums que cette carte grille souvent, il est donc sage de se préparer immédiatement à un éventuel remplacement. J'ai pris une bande avec des connecteurs sur deux rangées, j'ai soudé ceux du bas aux plages de contact avec des trous et j'ai amené vIn et vOut aux supérieurs. Après cela, j'ai rempli les joints de soudure avec de la colle chaude et j'ai emballé l'ensemble du panneau sous film thermorétractable.

La touche finale est un autocollant avec un numéro de téléphone. Cela donnera au moins un peu d'espoir en cas de perte du quadricoptère.

L'assemblée est désormais terminée. Il s'est avéré compact tout en préservant l'accès à toutes les commandes nécessaires. Vous pouvez voir plus de photos
Le désir de posséder son propre quadricoptère est tout à fait compréhensible, car c'est aujourd'hui une époque où le monde connaît un véritable boom. Le prix d’un « bon » drone, équipé d’une caméra haute résolution pour l’enregistrement vidéo, n’est pas abordable pour tout le monde.
(ArticleToC : activé = oui)
Mais il existe un moyen de s'en sortir : un quadricoptère à faire soi-même. L'assemblage étape par étape ne semble compliqué qu'à première vue.
L'ensemble de l'étape de fabrication à faire soi-même comprend :
- ensembles de châssis;
- achat des pièces de rechange nécessaires ;
- assemblées;
- câblage conducteur.
- Fabrication de cadres
Vous pouvez le fabriquer vous-même à partir de contreplaqué de 150x150 mm ou d'un profilé en aluminium de 14x14 mm. Les poutres, dont la longueur est de 300 mm, sont vissées en diagonale avec des vis. Les trous pour les moteurs peuvent être percés une fois le quadricoptère assemblé.
Une fine bande d'aluminium convient à la réception des skis. Il peut également être utilisé pour fabriquer un support de batterie.

Pièces de rechange nécessaires
- batterie de drone – 8 pièces ;
- batterie pour équipement;
- chargement – 1 ;
- Hélices de 10 pouces ;
- carte de commande (carte de commande multi-rotor HK 2.1);
- Équipement Turnigy 9x.
Le tout vous coûtera environ 120 $. Mais il faudra attendre environ 20 jours pour un colis en provenance de Hong Kong. Plus 5 jours jusqu'à ce que vous puissiez recevoir les importations. Au montant spécifié, vous devez ajouter 3 à 15 dollars pour la livraison.
Il est nécessaire de placer le tableau de commande le plus précisément possible au centre de la plateforme. Des trous sont percés dans les poutres et le contreplaqué. La planche est fixée aux poutres à l'aide de vis à métal.
Le récepteur est collé à côté de la planche à l'aide de superglue. Ils peuvent également être utilisés pour coller l'antenne aux poutres. Si le but des canaux et de la carte est le même, ils sont autorisés dans les câbles à trois fils.

La prochaine étape dans l'assemblage d'un quadricoptère de vos propres mains consiste à percer des trous pour le moteur. Il faut marquer les rayons à la même distance, pris « à l'oeil ». Le moteur s'adaptera avec un entraxe de trou de 19 mm et un filetage interne M3.
Pour l'arbre du moteur, vous devez percer un trou. Il est recommandé de le réaliser bout à bout et sur toute la largeur du carré, afin de ne pas accrocher aux bords du stand :

Nous vissons les câbles du moteur à la plate-forme à l'aide de vis M3 ne dépassant pas 4 mm, car c'est la taille du profilé. Ceci est fait afin de ne pas endommager le bobinage et de ne pas contribuer à un court-circuit entre spires en cas d'endommagement du vernis du fil.
Câblage
Il est maintenant temps de passer au câblage. Parmi les quatre contrôleurs de vitesse, vous devez souder une « araignée » en soudant les fils directement dans les prises adaptateurs.

Les connexions détachables sont utilisées en un seul endroit - lors de la connexion du « araignée » à la batterie. Toutes les autres connexions sont soudées et serrées dans un cordon thermorétractable afin que les fils ne tombent pas lors des vibrations.
Selon les numéros de moteur sur la carte, nous connectons les fils de signal des pilotes. Si un modèle de vol « plus » est utilisé, ils doivent être connectés aux broches M1-M4 (lorsque vous apprenez à contrôler, le firmware peut être modifié).
Le schéma de connexion est donné ci-dessous :

Le résultat sera un quadricoptère fabriqué maison pesant un kilogramme. Un vol d'essai peut être effectué.

Mais vous devez d’abord charger la batterie, la connecter ainsi qu’à l’émetteur. Il est maintenant temps d'appuyer sur l'accélérateur vers la droite et vers le bas. La LED sur la carte doit s'allumer en rouge. Le moment suivant est que la poignée de gaz est avancée. Les moteurs devraient commencer à fonctionner et le quadricoptère devrait « partir » en vol.
C'était un simple quadricoptère DIY. Si vous devez assembler un quadricoptère vous-même, et même avec une caméra, qui aurait de bonnes performances et de bonnes qualités de vol, il existe une autre option. L'assemblage dépend du modèle spécifique, des caractéristiques électroniques et du nombre d'éléments structurels.

Pièces de drone DIY avec caméra
Ceux-ci inclus:
- moteur D2822/14 – 4 pièces ;
- régulateur de vitesse - le même;
- rotors de rotation – gauche et droite ;
- répartiteur de puissance ou prise jack 3,5 mm pour connecter les contrôleurs de vitesse.
Vous ne pouvez pas vous passer d'une carte de réglage vous-même du quadricoptère, connectée à un ordinateur via USB - MultiWii ATmega32U4. Pour que le lancement ait lieu, vous avez besoin de batteries Nano Tech 2200 30C - 4 pièces, car en utilisant un seul lecteur, le temps de vol sera court.
Pour restaurer l'énergie, ils ont besoin d'être rechargés. Pour l'assembler vous-même, vous aurez également besoin d'un contrôleur avec lequel vous pourrez régler le vol. Un appareil Turnigy 9x convient à la télécommande. Vous pouvez capter des signaux à une distance de 800 à 900 mètres. L'émetteur de signal est livré complet avec la télécommande.
Assemblée
Comme dans le premier cas, cela commence par la fabrication d'un cadre pour lequel vous pouvez prendre des tuyaux en plastique. Comme son poids est léger, le quadricoptère sera mobile et sa vitesse de développement sera élevée. De plus, un tel châssis est facile à réparer en cas d'« accident ».
Les rotors sont fixés aux coins du cadre rectangulaire. La structure doit être équipée de « pieds » sur lesquels la caméra peut être fixée.
Des fils de silicone aideront à connecter les moteurs à chaque hélice. C'est une bonne idée de monter la batterie avec l'électronique sur une plate-forme installée au centre du cadre. Avant de commencer l'installation des composants électroniques, vous devez télécharger le schéma de connexion, facile à trouver sur les forums. Si nécessaire, la télécommande peut être flashée en tenant compte des dernières mises à jour. Là, sur les forums, on vous explique comment reflasher la télécommande.

Tout le monde ne peut pas assembler un quadricoptère de ses propres mains, car cela nécessite des compétences en ingénierie. Mais s'il existe des instructions et un schéma, le processus de création d'un appareil volant est simplifié.
Assemblage étape par étape
Les personnes qui souhaitent assembler un quadricoptère de leurs propres mains essaient d'économiser de l'argent, ce qui est compréhensible. Mais ce n'est pas la seule raison : beaucoup s'intéressent à la question parce que leur passe-temps de piloter un drone s'est transformé en un désir de participer à des courses et, si possible, d'en devenir le vainqueur. Et cela nécessite une modification de la conception.

Assemblage à partir du kit
En acquérant le kit approprié, vous pouvez simplifier considérablement le processus d'assemblage d'un avion vous-même.
Cela coûte plusieurs fois moins cher qu'un quadricoptère prêt à l'emploi, puisque l'utilisateur sera responsable de l'assemblage, du firmware, de l'étalonnage et du réglage fin. Le principal avantage des kits est qu’il n’est pas nécessaire de sélectionner les puces, la puissance du moteur ou le poids du boîtier.
Il n'y a pas non plus lieu de s'inquiéter de l'équilibre, qui affecte le comportement du quadricoptère en vol - il disposera de tous les paramètres nécessaires, y compris la vitesse prévue et le temps passé en vol.
Les kits vous permettent d'assembler de vos propres mains des drones pliables et monolithiques. Ici, c'est au pilote de décider quel type de conception il souhaite avoir. Les modèles pliables intéressent ceux qui préfèrent les modèles grands mais également facilement portables.
Mais juste pour mémoire : De tels modèles n'ont pas un design attrayant, car le boîtier extérieur, qui remplit une fonction décorative et protectrice, n'est pas inclus.
Comment assembler une telle structure de vos propres mains est décrit en détail dans les instructions ci-jointes.
En règle générale, tout commence par l'installation de moteurs sur un exosquelette en plastique, en carbone ou en métal. Ensuite des câbles PIN sont placés pour réguler la puissance des moteurs. Plus tard, un récepteur de signal et un module de contrôle – le centre cérébral – sont fixés au corps.
Au stade final, des LED, des pinces et des batteries sont installées.
L'assemblage se termine ici, mais le plaisir commence - firmware, calibrage et réglage fin de l'appareil, ce qui prend de 30 minutes à 3 heures (selon le fabricant des pièces incluses dans le kit). À ce stade, la batterie doit être complètement chargée.
Assemblage d'un quadricoptère à partir de matériaux de récupération
Bien qu'il soit populaire parmi les fans de drones « volants », il faut admettre qu'il ne permet pas d'acquérir un hélicoptère à part entière. Vous devrez certainement acheter des pièces, ne prenez pas l'ensemble, mais les plus nécessaires : vis, moteurs, batterie, carte de commande et récepteur, équipement de contrôle, sans lesquels il est impossible de contrôler l'appareil.
Pour éviter que les composants ne s'effondrent dans l'air, ils doivent être fixés sur un cadre léger mais durable. Tout peut convenir pour réaliser cela : des bâtonnets de glace, des bouteilles et des bouchons en plastique.
Lors de la création d'un corps, il ne faut pas oublier la stabilité de la structure, assemblée de nos propres mains, l'équilibre, les performances de vol et la légèreté.
Si vos connaissances le permettent, vous pouvez élaborer votre propre schéma, sinon trouvez-le sur Internet.
La première construction n’est généralement que le début. Il sera amélioré à plusieurs reprises dans le futur.

Il existe une astuce qui vous aide à éviter les calculs d'équilibrage complexes : vous devez sélectionner un modèle spécifique et commander ses composants dans la liste de base.
L'essentiel est d'indiquer correctement les détails. Par exemple, la liste doit comprendre deux moteurs à rotation gauche et droite et leurs hélices correspondantes. Sinon, l'appareil ne fonctionnera pas.
Si possible, il vaut la peine de commander plus de pièces en cas de remplacement de pièces défectueuses (cela arrive). Contrairement aux kits vendus, vous ne pourrez pas assembler un quadricoptère de vos propres mains (nues).
Tu auras besoin de:
- pistolet à colle;
- Tournevis;
- fer à souder;
- Ruban adhésif double face;
- ruban isolant.
Lorsque le modèle de travail sera prêt, le moment viendra de la modernisation, à la suite de laquelle le quadricoptère pourra être équipé de LED, d'une antenne, de bips, etc., augmentant ainsi les fonctionnalités.
Vidéo : quadcoptère DIY
L’un des éléments les plus importants de tout quadricoptère est la batterie. Il existe des batteries spécialisées pour les modèles radiocommandés, il faut donc savoir les sélectionner, les utiliser et les charger.
Cela garantira un fonctionnement sûr et à long terme. Batteries pour quadricoptères Il est recommandé de choisir le type LiPo/LiPol. Ces batteries sont déterminées par trois caractéristiques, à savoir la capacité, le courant de décharge maximal et la tension. La capacité indique le courant qu'une batterie peut délivrer avant d'être complètement déchargée en une heure.
Le deuxième paramètre détermine à quel point le courant de décharge maximum est supérieur à la capacité. La tension dépend du nombre de cellules de la batterie, donc plus il y en a, plus cet indicateur sera élevé.

Batterie pour quadricoptère LiPol présente un certain nombre d'avantages, notamment une faible autodécharge, une large plage de températures de fonctionnement, l'absence de ce que l'on appelle l'effet mémoire et une faible chute de tension pendant la décharge. Parmi les modèles les plus populaires figurent le Turnigy 5000mAh 3S 30C Lipo Pack et la batterie Pulsar Li-pol 22,2V 12000mAh, 25C, 6s1p, EC5. L'une des meilleures batteries aujourd'hui est la Gens ACE Tattu 22000 mah 6s1p 22,2v. Cette batterie a une capacité énergétique ultra élevée et est légère. Dans certains cas, c'est le facteur déterminant. Des performances maximales sont obtenues grâce à la technologie Oracover, qui minimise l'échauffement du boîtier et des plaques de la batterie.
Ces batteries sont chargées à l'aide d'un chargeur spécial. Par exemple, DJI Ronin, ImaxRC B3 Pro et SkyRC iMAX B6AC. La grande majorité des modèles sont alimentés non pas par le réseau, mais par une tension continue transmise par une unité spéciale. Vous pouvez choisir une alimentation eFUEL 50A 1200W ou SkyRC eFuel 30A 12-18V.
Cependant, vous pouvez également acheter un chargeur plus universel, qui peut être alimenté à la fois par une source d'alimentation 12 V et par un réseau 220 V. Ainsi, le propriétaire du quadricoptère a la possibilité d'économiser sur l'achat d'un adaptateur supplémentaire.
L’ImaxRC X350 est l’un des meilleurs appareils de ce type aujourd’hui. La principale caractéristique distinctive de ce modèle est des courants de charge/décharge plus élevés, à savoir 15/16A. Le fabricant a équipé cette version du chargeur d'un écran tactile spécial, qui ouvre une plus grande fonctionnalité à l'utilisateur.
Alors si tu veux acheter une batterie pour un quadricoptère, tenez compte des paramètres de tension, du courant de décharge maximum, de la capacité et, bien sûr, du poids de l'appareil lui-même. Il convient également de réfléchir à la manière dont vous allez charger l'appareil.
La batterie est l’une des pièces les plus importantes du drone. Cet article explique comment sélectionner, charger et utiliser des appareils spécialisés.
batteries pour hélicoptères et ce qui est nécessaire pour un service long et sûr.
Caractéristiques des batteries pour hélicoptères
Les moteurs des quadricoptères, selon leur taille, peuvent consommer un courant important. Sur notre hélicoptère, le courant total peut atteindre 100A en montée. En revanche, le poids de la batterie doit être le plus réduit possible et il ne sera pas possible d'emporter une batterie de grande capacité en vol. Par conséquent, la principale exigence des batteries est une sortie de courant élevée. Et de ce point de vue, les batteries lithium-polymère présentent les meilleures caractéristiques. Pour notre hélicoptère relativement grand avec une diagonale de 600 mm, nous avons acheté des batteries de 2 200 et 3 000 mA.
Caractéristiques des accus LiPo
- Capacité. Enregistré en ampères-heures. Il s’agit du courant qu’une batterie peut produire en une heure jusqu’à ce qu’elle soit complètement déchargée. Par exemple, si la capacité de la batterie est de 3 A/h, elle peut alors produire un courant de 3 A pendant une heure. À un courant de 1A, il durera 3 heures et à un courant de 30A, il se déchargera en 6 minutes.
- Courant de décharge maximum. Il est indiqué de combien le courant de décharge maximum dépasse la capacité. Par exemple, la valeur « 30-40C » pour une batterie d'une capacité de 3A/h signifie qu'elle peut fournir brièvement un courant de 90-120A. Naturellement, lors du choix d'une batterie, il faut se laisser guider par une valeur inférieure.
- Tension. Cela dépend du nombre de « canettes » ou de cellules de batterie. La tension d’une cellule de batterie LiPo est d’environ 3,7 V. En conséquence, plus il y a de cellules, plus la tension est élevée. En connectant les batteries en série, vous pouvez créer une tension assez élevée, comme cela se fait par exemple dans les vélos électriques.
En plus des avantages énumérés, les batteries LiPo ont une faible autodécharge, aucun effet mémoire, une large plage de températures de fonctionnement et une faible chute de tension lors de la décharge. Les inconvénients ne comprennent pas la densité de charge la plus élevée, un petit nombre de cycles de fonctionnement et un risque d'incendie. De plus, pour charger des batteries LiPo constituées de plusieurs cellules, il est nécessaire d'utiliser des chargeurs spéciaux qui assurent une charge uniforme des cellules.
Charger des batteries LiPo
Pour charger, vous devrez acheter un chargeur spécial. Nous avons acheté le nôtre chez HobbyKing. Presque tous les modèles ne sont pas alimentés par le secteur, mais par une tension constante de 12 V. Une telle alimentation peut être commandée là-bas, mais nous avons préféré acheter une alimentation chez Mean Well NES-100-12. Nous avons combiné le chargeur avec l'alimentation pour toujours.

La particularité de ce chargeur est qu’il permet d’équilibrer les cellules de batterie. C'est-à-dire que la batterie y est connectée non seulement avec un connecteur d'alimentation, mais également avec un connecteur d'équilibrage supplémentaire auquel toutes les cellules sont connectées individuellement. Cela permet de charger toutes les cellules de manière uniforme, ce qui donne la même répartition de la charge sur les parcs de batteries pendant le fonctionnement.
En plus du LiPo, ce chargeur peut charger tous les principaux types de batteries (par exemple, j'ai chargé une batterie de voiture avec), ainsi que mesurer la résistance interne et effectuer un cycle de mesure de capacité. Dans ce dernier cas, il décharge et charge complètement la batterie et fournit des informations sur la capacité réelle de la batterie.
Le chargeur est plutôt bien fait. J'ai été particulièrement surpris par son système de refroidissement. Le refroidisseur qu'il contient souffle directement sur les bornes de sortie auxquelles la chaleur est fournie.

Chargeur démonté
Nous avons également réalisé une vidéo sur la façon de charger une batterie LiPo :
Application des batteries LiPo
Pour connecter les batteries, des connecteurs spéciaux sont utilisés. Le diamètre des pistons est de 4 mm et ils sont en outre chargés par ressort pour offrir une grande surface de contact. Pour la connexion, ils utilisent également des fils spéciaux en isolation silicone, qui peuvent résister à des températures élevées.

Nous vous recommandons d'acheter des connecteurs correspondants pour les batteries et, si possible, des fils en silicone pour la commutation.
L'une des raisons de la défaillance de la batterie peut être une décharge importante de l'une des cellules. Très souvent, les contrôleurs de vol ou les contrôleurs de vitesse ont une fonction de surveillance de la tension de la batterie, mais ils mesurent la tension sur la batterie et ne surveillent pas chaque cellule spécifique. Pour éviter les déséquilibres, il est préférable d'utiliser des testeurs spéciaux :

Ils indiquent la tension sur chaque banc, et en cas de forte décharge de l'un d'eux, ils émettent un signal sonore fort. Ils se connectent à la batterie et volent avec.
Mais vous pouvez assembler vous-même un testeur aussi simple.
Des mesures de précaution
Il existe de nombreuses vidéos sur YouTube sur ce qui se passe si vous percez une batterie LiPo. Si vous ne voulez pas que la batterie brûle tout l'hélicoptère après une chute infructueuse, vous devez absolument veiller à la protection mécanique de la batterie. Par exemple, vous pouvez acheter pour votre batterie
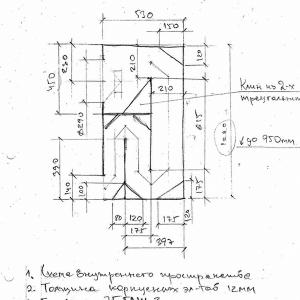
Tout d’abord, après avoir sélectionné la taille du carré, j’ai commencé à dessiner le dessin sur un morceau de papier peint.
D'ailleurs, j'ai choisi la taille 45 - universelle, puisque c'est mon premier drone, et je ne sais pas dans quelle direction je vais le développer.
Après avoir récupéré toute la fibre de verre à la maison, j'ai commencé à découper deux bases identiques, entre lesquelles les rayons seraient pris en sandwich. 
Le matériau pour fabriquer les poutres était un profilé carré en aluminium de 10*10 mm
Version d'aperçu...
J'ai fixé les poutres entre les bases à l'aide de vis et d'écrous, je ne trouvais rien d'autre)

 Allons-nous en...
Allons-nous en...
Les pieds et le châssis étaient également en fibre de verre. Après avoir dessiné un croquis, j'ai commencé à découper les flans 
 Puis il a commencé à torturer le tournevis
Puis il a commencé à torturer le tournevis  Malgré tout, le drone tenait toujours debout)
Malgré tout, le drone tenait toujours debout)
 Et maintenant - pesée. Le poids du cadre, sans aucun équipement, était de 263 grammes. Je pense que c'est un poids assez acceptable, mais qu'en pensez-vous ?
Et maintenant - pesée. Le poids du cadre, sans aucun équipement, était de 263 grammes. Je pense que c'est un poids assez acceptable, mais qu'en pensez-vous ?
Maintenant que le cadre est assemblé, vous pouvez commencer à installer les composants.
J'ai choisi ces moteurs et régulateurs :
 Moteur EMAX XA2212 820KV 980KV 1400KV avec ESC Simonk 20A
Moteur EMAX XA2212 820KV 980KV 1400KV avec ESC Simonk 20A
Produit http://www.site/ru/product/1669970/ Cerveau, tout le monde connaît cc3d
 Contrôleur de vol CC3D
Contrôleur de vol CC3D
Produit http://www.site/ru/product/1531419/ Batterie:
 Batterie lithium polymère ZIPPY Flightmax 3000mAh 3S1P 20C
Batterie lithium polymère ZIPPY Flightmax 3000mAh 3S1P 20C
Produit http://www.site/ru/product/8851/
Les moteurs avec des croix standard étaient fixés aux poutres avec des boulons et des écrous 

 Les moteurs sont installés. J'ai scotché les régulateurs sur du ruban isolant, les radiateurs sur les poutres.
Les moteurs sont installés. J'ai scotché les régulateurs sur du ruban isolant, les radiateurs sur les poutres. 

 Ensuite, le tableau de distribution électrique a été placé entre les plaques de fibre de verre.
Ensuite, le tableau de distribution électrique a été placé entre les plaques de fibre de verre.
 J'ai soudé tous les fils nécessaires (régulateurs, feux de position).
J'ai soudé tous les fils nécessaires (régulateurs, feux de position).
Les perfectionnistes ne devraient pas regarder)))  J'ai vérifié la fonctionnalité...
J'ai vérifié la fonctionnalité...  Après avoir installé le tableau de distribution d’énergie, j’ai commencé à installer les cerveaux. Je les ai collés sur du ruban adhésif double face.
Après avoir installé le tableau de distribution d’énergie, j’ai commencé à installer les cerveaux. Je les ai collés sur du ruban adhésif double face.  J'ai fait la même chose avec le récepteur
J'ai fait la même chose avec le récepteur  La batterie est fixée à l'aide de Velcro sur la base inférieure du quad.
La batterie est fixée à l'aide de Velcro sur la base inférieure du quad.  C'est tout! Le poids en vol du quadricoptère est de 993 grammes. Après avoir flashé le contrôleur de vol, je suis sorti pour les premiers tests.
C'est tout! Le poids en vol du quadricoptère est de 993 grammes. Après avoir flashé le contrôleur de vol, je suis sorti pour les premiers tests.
Regardez la vidéo du vol à partir de 2,50 minutes
Le quadricoptère a été construit à la fin de l'été 2016, nous sommes maintenant au début de 2017. Pendant cette période, le quadricoptère a passé suffisamment de temps dans le ciel. Pour le moment, l'hélicoptère est intact, il n'y a pas eu un seul crash, je l'ai légèrement modernisé pour installer une caméra à bord. À l'avenir, je veux apprendre à piloter du FPV dessus. Maintenant je commence petit à petit à assembler un système Fpv, un émetteur vidéo, j'ai déjà commandé le récepteur))
Merci à tous ceux qui ont lu ce qui précède, si vous avez des questions, des conseils, des suggestions, écrivez dans les commentaires. Vous trouverez ci-dessous des photographies prises par un appareil photo monté sur un quadricoptère, ainsi que le quadricoptère lui-même.
Avec UV. Alexeï