Trouver le produit vectoriel dans un système de coordonnées rectangulaires. Produit croisé de vecteurs. Produit mixte de vecteurs
Yandex.RTB R-A-339285-1Avant de donner la notion de produit vectoriel, abordons la question de l'orientation d'un triplet ordonné de vecteurs a →, b →, c → dans l'espace tridimensionnel.
Pour commencer, mettons de côté les vecteurs a → , b → , c → à partir d’un point. L'orientation du triplet a → , b → , c → peut être droite ou gauche, selon la direction du vecteur c → lui-même. Le type de triple a → , b → , c → sera déterminé à partir de la direction dans laquelle le tour le plus court est effectué du vecteur a → à b → à partir de la fin du vecteur c → .
Si le tour le plus court est effectué dans le sens inverse des aiguilles d'une montre, alors le triplet de vecteurs a → , b → , c → est appelé droite, si dans le sens des aiguilles d'une montre – gauche.
Ensuite, prenons deux vecteurs non colinéaires a → et b →. Traçons ensuite les vecteurs A B → = a → et A C → = b → à partir du point A. Construisons un vecteur A D → = c →, qui est simultanément perpendiculaire à A B → et A C →. Ainsi, lors de la construction du vecteur lui-même A D → = c →, nous pouvons faire deux choses, en lui donnant soit une direction, soit la direction opposée (voir illustration).

Un triplet ordonné de vecteurs a → , b → , c → peut être, comme nous l'avons découvert, à droite ou à gauche selon la direction du vecteur.
À partir de ce qui précède, nous pouvons introduire la définition d’un produit vectoriel. Cette définition est donné pour deux vecteurs définis dans un système de coordonnées rectangulaires dans un espace tridimensionnel.
Définition 1
Le produit vectoriel de deux vecteurs a → et b → nous appellerons un tel vecteur défini dans un système de coordonnées rectangulaires d'un espace tridimensionnel tel que :
- si les vecteurs a → et b → sont colinéaires, il sera nul ;
- il sera perpendiculaire à la fois au vecteur a → et au vecteur b → c'est-à-dire ∠ une → c → = ∠ b → c → = π 2 ;
- sa longueur est déterminée par la formule : c → = a → · b → · sin ∠ a → , b → ;
- le triplet de vecteurs a → , b → , c → a la même orientation que dans ce système coordonnées
Oeuvre vectorielle les vecteurs a → et b → ont la notation suivante : a → × b → .
Coordonnées du produit vectoriel
Puisque tout vecteur a certaines coordonnées dans le système de coordonnées, nous pouvons introduire une deuxième définition d'un produit vectoriel, qui nous permettra de trouver ses coordonnées en utilisant les coordonnées données des vecteurs.
Définition 2
Dans un système de coordonnées rectangulaires d'un espace tridimensionnel produit vectoriel de deux vecteurs a → = (a x ; a y ; a z) et b → = (b x ; b y ; b z) s'appelle un vecteur c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k → , où i → , j → , k → sont des vecteurs de coordonnées.
Le produit vectoriel peut être représenté comme un déterminant Matrice Carrée troisième ordre, où la première ligne contient les vecteurs du vecteur i → , j → , k → , la deuxième ligne contient les coordonnées du vecteur a → , et la troisième ligne contient les coordonnées du vecteur b → dans un rectangle donné système de coordonnées, ce déterminant matriciel ressemble à ceci : c → = a → × b → = i → j → k → a x a y a z b x b y b z
En développant ce déterminant dans les éléments de la première ligne, on obtient l'égalité : c → = a → × b → = i → j → k → a x a y a z b x b y b z = a y a z b y b z · i → - a x a z b x b z · j → + a x a y b x by · k → = = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k →
Propriétés d'un produit vectoriel
On sait que le produit vectoriel en coordonnées est représenté comme le déterminant de la matrice c → = a → × b → = i → j → k → a x a y a z b x b y b z , puis sur la base propriétés du déterminant matriciel les éléments suivants sont affichés propriétés d'un produit vectoriel :
- anticommutativité a → × b → = - b → × a → ;
- distributivité a (1) → + a (2) → × b = a (1) → × b → + a (2) → × b → ou a → × b (1) → + b (2) → = a → × b (1) → + a → × b (2) → ;
- associativité λ a → × b → = λ a → × b → ou a → × (λ b →) = λ a → × b →, où λ est un nombre réel arbitraire.
Ces propriétés ont des preuves simples.
A titre d'exemple, nous pouvons prouver la propriété anticommutative d'un produit vectoriel.
Preuve d'anticommutativité
Par définition, a → × b → = i → j → k → a x a y a z b x b y b z et b → × a → = i → j → k → b x b y b z a x a y a z . Et si les deux lignes de la matrice sont réarrangées par endroits, alors la valeur du déterminant matriciel devrait changer à l'opposé, donc a → → × b → J → K → K → A X A Y A Z B X B Y B Z = - I → K → B Y B Yb Z A X A Y A Z = - B → × A →, ce qui prouve que le produit vectoriel est anticommutatif.
Produit vectoriel - exemples et solutions
Dans la plupart des cas, il existe trois types de problèmes.
Dans les problèmes du premier type, les longueurs de deux vecteurs et l'angle entre eux sont généralement donnés, et vous devez trouver la longueur du produit vectoriel. Dans ce cas, utilisez la formule suivante c → = a → · b → · sin ∠ a → , b → .
Exemple 1
Trouvez la longueur du produit vectoriel des vecteurs a → et b → si vous connaissez a → = 3, b → = 5, ∠ a →, b → = π 4.
Solution
En déterminant la longueur du produit vectoriel des vecteurs a → et b →, nous résolvons ce problème : a → × b → = a → · b → · sin ∠ a → , b → = 3 · 5 · sin π 4 = 15 2 2 .
Répondre: 15 2 2 .
Les problèmes du deuxième type ont un lien avec les coordonnées des vecteurs, dans lesquels le produit vectoriel, sa longueur, etc. sont recherchés à travers les coordonnées connues de vecteurs donnés une → = (une x ; une y ; une z) Et b → = (b x ; b y ; b z) .
Pour ce type de problème, vous pouvez résoudre de nombreuses options de tâches. Par exemple, ce ne sont pas les coordonnées des vecteurs a → et b → qui peuvent être spécifiées, mais leurs développements dans vecteurs de coordonnées gentil b → = b x · i → + b y · j → + b z · k → et c → = a → × b → = (a y b z - a z b y) i → + (a z b x - a x b z) j → + (a x b y - a y b x) k →, ou les vecteurs a → et b → peuvent être spécifiés par les coordonnées de leur début et les points finaux.
Considérez les exemples suivants.
Exemple 2
Dans un système de coordonnées rectangulaires, deux vecteurs sont donnés : a → = (2 ; 1 ; - 3), b → = (0 ; - 1 ; 1). Trouvez leur produit vectoriel.
Solution
Par la deuxième définition, nous trouvons le produit vectoriel de deux vecteurs dans des coordonnées données : a → × b → = (a y · b z - a z · b y) · i → + (a z · b x - a x · b z) · j → + ( a x · b y - a y · b x) · k → = = (1 · 1 - (- 3) · (- 1)) · i → + ((- 3) · 0 - 2 · 1) · j → + (2 · (- 1) - 1 · 0) · k → = = - 2 je → - 2 j → - 2 k → .
Si nous écrivons le produit vectoriel en termes du déterminant de la matrice, alors la solution cet exemple ressemble à ceci : a → × b → = i → j → k → a x a y a z b x b y b z = i → j → k → 2 1 - 3 0 - 1 1 = - 2 i → - 2 j → - 2 k → .
Répondre: une → × b → = - 2 je → - 2 j → - 2 k → .
Exemple 3
Trouvez la longueur du produit vectoriel des vecteurs i → - j → et i → + j → + k →, où i →, j →, k → sont les vecteurs unitaires du système de coordonnées cartésiennes rectangulaires.
Solution
Tout d'abord, trouvons les coordonnées d'un produit vectoriel donné i → - j → × i → + j → + k → dans un système de coordonnées rectangulaires donné.
On sait que les vecteurs i → - j → et i → + j → + k → ont respectivement les coordonnées (1 ; - 1 ; 0) et (1 ; 1 ; 1). Trouvons la longueur du produit vectoriel en utilisant le déterminant de la matrice, alors nous avons i → - j → × i → + j → + k → = i → j → k → 1 - 1 0 1 1 1 = - i → - j → + 2 k → .
Par conséquent, le produit vectoriel i → - j → × i → + j → + k → a des coordonnées (- 1 ; - 1 ; 2) dans le système de coordonnées donné.
Nous trouvons la longueur du produit vectoriel à l'aide de la formule (voir la section sur la recherche de la longueur d'un vecteur) : i → - j → × i → + j → + k → = - 1 2 + - 1 2 + 2 2 = 6.
Répondre: je → - j → × je → + j → + k → = 6 . .
Exemple 4
Dans un système de coordonnées cartésiennes rectangulaires, les coordonnées de trois points A (1, 0, 1), B (0, 2, 3), C (1, 4, 2) sont données. Trouvez un vecteur perpendiculaire à A B → et A C → en même temps.
Solution
Les vecteurs A B → et A C → ont respectivement les coordonnées suivantes (- 1 ; 2 ; 2) et (0 ; 4 ; 1). Après avoir trouvé le produit vectoriel des vecteurs A B → et A C →, il est évident qu'il s'agit d'un vecteur perpendiculaire par définition à la fois à A B → et à A C →, c'est-à-dire qu'il s'agit d'une solution à notre problème. Trouvons-le A B → × A C → = i → j → k → - 1 2 2 0 4 1 = - 6 i → + j → - 4 k → .
Répondre: - 6 je → + j → - 4 k → . - un des vecteurs perpendiculaires.
Les problèmes du troisième type se concentrent sur l'utilisation des propriétés du produit vectoriel des vecteurs. Après avoir appliqué cela, nous obtiendrons une solution au problème posé.
Exemple 5
Les vecteurs a → et b → sont perpendiculaires et leurs longueurs sont respectivement 3 et 4. Trouver la longueur du produit vectoriel 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 a → × a → + 3 · une → × - 2 · b → + - b → × une → + - b → × - 2 · b → .
Solution
Par la propriété distributive d'un produit vectoriel, on peut écrire 3 a → - b → × a → - 2 b → = 3 a → × a → - 2 b → + - b → × a → - 2 b → = = 3 une → × une → + 3 une → × - 2 b → + - b → × une → + - b → × - 2 b →
Par la propriété d'associativité, on retire les coefficients numériques du signe des produits vectoriels dans la dernière expression : 3 · a → × a → + 3 · a → × - 2 · b → + - b → × a → + - b → × - 2 · b → = = 3 · a → × a → + 3 · (- 2) · a → × b → + (- 1) · b → × a → + (- 1) · (- 2) · b → × b → = = 3 a → × a → - 6 a → × b → - b → × a → + 2 b → × b →
Les produits vectoriels a → × a → et b → × b → sont égaux à 0, puisque a → × a → = a → · a → · sin 0 = 0 et b → × b → = b → · b → · sin 0 = 0, alors 3 · a → × a → - 6 · a → × b → - b → × a → + 2 · b → × b → = - 6 · a → × b → - b → × a → . .
De l'anticommutativité du produit vectoriel il résulte - 6 · a → × b → - b → × a → = - 6 · a → × b → - (- 1) · a → × b → = - 5 · a → × b → . .
En utilisant les propriétés du produit vectoriel, nous obtenons l'égalité 3 · a → - b → × a → - 2 · b → = = - 5 · a → × b → .
Par condition, les vecteurs a → et b → sont perpendiculaires, c'est-à-dire que l'angle entre eux est égal à π 2. Il ne reste plus qu'à substituer les valeurs trouvées dans les formules appropriées : 3 a → - b → × a → - 2 b → = - 5 a → × b → = = 5 a → × b → = 5 a → b → · sin (a → , b →) = 5 · 3 · 4 · sin π 2 = 60 .
Répondre: 3 une → - b → × une → - 2 b → = 60.
La longueur du produit vectoriel des vecteurs par définition est égale à a → × b → = a → · b → · sin ∠ a → , b → . Puisqu'on sait déjà (dès le cours scolaire) que l'aire d'un triangle est égale à la moitié du produit des longueurs de ses deux côtés multiplié par le sinus de l'angle entre ces côtés. Par conséquent, la longueur du produit vectoriel est égale à l'aire du parallélogramme - un triangle doublé, à savoir le produit des côtés sous forme de vecteurs a → et b →, posé à partir d'un point, par le sinus de l'angle entre eux sin ∠ a →, b →.
C'est la signification géométrique d'un produit vectoriel.

Signification physique du produit vectoriel
En mécanique, une des branches de la physique, grâce au produit vectoriel, on peut déterminer le moment d'une force par rapport à un point de l'espace.
Définition 3
Par le moment de force F → appliqué au point B, par rapport au point A, on comprendra le produit vectoriel suivant A B → × F →.
Si vous remarquez une erreur dans le texte, veuillez la surligner et appuyer sur Ctrl+Entrée
Vecteur unitaire- Ce vecteur, dont la valeur absolue (module) est égale à l'unité. Pour désigner un vecteur unitaire, nous utiliserons l'indice e. Ainsi, si un vecteur est donné UN, alors son vecteur unitaire sera le vecteur UN e. Ce vecteur unitaire est dirigé dans la même direction que le vecteur lui-même UN, et son module est égal à un, c'est-à-dire a e = 1.
Évidemment, UN= un UN e (un - module vectoriel UN). Cela découle de la règle selon laquelle l'opération de multiplication d'un scalaire par un vecteur est effectuée.
Vecteurs unitaires souvent associé aux axes de coordonnées d'un système de coordonnées (en particulier aux axes d'un système de coordonnées cartésiennes). Les directions de ces vecteurs coïncident avec les directions des axes correspondants, et leurs origines sont souvent combinées avec l'origine du système de coordonnées.
Permettez-moi de vous rappeler que système de coordonnées cartésiennes dans l'espace, on appelle traditionnellement un trio d'axes mutuellement perpendiculaires se coupant en un point appelé origine des coordonnées. Les axes de coordonnées sont généralement désignés par les lettres X, Y, Z et sont appelés respectivement axe des abscisses, axe des ordonnées et axe applicable. Descartes lui-même n'utilisait qu'un seul axe, sur lequel étaient portées les abscisses. Mérite d'utilisation systèmes les haches appartiennent à ses élèves. C'est pourquoi la phrase système de coordonnées cartésiennes historiquement faux. Il vaut mieux parler rectangulaire système de coordonnées ou système de coordonnées orthogonales. Cependant, nous ne changerons pas les traditions et, à l'avenir, nous supposerons que les systèmes de coordonnées cartésiens et rectangulaires (orthogonaux) sont une seule et même chose.
Vecteur unitaire, dirigé le long de l'axe X, est noté je, vecteur unitaire, dirigé le long de l'axe Y, est noté j, UN vecteur unitaire, dirigé le long de l'axe Z, est noté k. Vecteurs je, j, k sont appelés orts(Fig. 12, à gauche), ils ont des modules uniques, c'est-à-dire
je = 1, j = 1, k = 1.
Haches et vecteurs unitaires système de coordonnées rectangulaires dans certains cas, ils portent des noms et des désignations différents. Ainsi, l'axe des abscisses X peut être appelé axe tangent, et son vecteur unitaire est noté τ (Lettre minuscule grecque tau), l'axe des ordonnées est l'axe normal, son vecteur unitaire est noté n, l'axe applicable est l'axe binormal, son vecteur unitaire est noté b. Pourquoi changer de nom si l’essence reste la même ?
Le fait est que, par exemple, en mécanique, lors de l'étude du mouvement des corps, le système de coordonnées rectangulaires est très souvent utilisé. Ainsi, si le système de coordonnées lui-même est stationnaire et que le changement des coordonnées d'un objet en mouvement est suivi dans ce système stationnaire, alors les axes sont généralement désignés X, Y, Z et leurs vecteurs unitaires respectivement je, j, k.
Mais souvent, lorsqu'un objet se déplace le long d'un chemin courbe (par exemple, en cercle), il est plus pratique de considérer processus mécaniques dans un système de coordonnées se déplaçant avec cet objet. C'est pour un tel système de coordonnées mobiles que d'autres noms d'axes et leurs vecteurs unitaires sont utilisés. C'est comme ça. Dans ce cas, l'axe X est dirigé tangentiellement à la trajectoire au point où se trouve actuellement cet objet. Et puis cet axe ne s'appelle plus axe X, mais axe tangent, et son vecteur unitaire n'est plus désigné je, UN τ . L'axe Y est dirigé le long du rayon de courbure de la trajectoire (en cas de mouvement en cercle - vers le centre du cercle). Et comme le rayon est perpendiculaire à la tangente, l’axe est appelé axe normal (perpendiculaire et normal sont la même chose). Le vecteur unitaire de cet axe n'est plus noté j, UN n. Le troisième axe (anciennement Z) est perpendiculaire aux deux précédents. C'est un binormal avec une ortho b(Fig. 12, à droite). À propos, dans ce cas, tel système rectangulaire coordonnées souvent appelé « naturel » ou naturel.
Définition Une collection ordonnée de (x 1 , x 2 , ... , x n) n nombres réels est appelée vecteur à n dimensions, et les nombres x je (i = ) - Composants, ou coordonnées,
Exemple. Si, par exemple, une certaine usine automobile doit produire 50 voitures particulières, 100 camions, 10 bus, 50 jeux de pièces détachées pour voitures et 150 jeux pour camions et bus, alors le programme de production de cette usine peut être écrit sous la forme d'un vecteur (50, 100, 10, 50, 150) ayant cinq composantes.
Notation. Les vecteurs sont indiqués en gras minuscules ou des lettres avec une barre ou une flèche en haut, par exemple, un ou. Les deux vecteurs sont appelés égal, s'ils ont le même nombre de composants et que leurs composants correspondants sont égaux.
Les composants vectoriels ne peuvent pas être échangés, par exemple (3, 2, 5, 0, 1) et (2, 3, 5, 0, 1) vecteurs différents.
Opérations sur les vecteurs. Le travail
X= (x 1 , x 2 , ... ,x n) par un nombre réelλ appelé vecteurλ X= (λ x 1, λ x 2, ..., λ x n).
MontantX= (x 1 , x 2 , ... ,x n) et oui= (y 1 , y 2 , ... ,y n) est appelé un vecteur x+y= (X 1 + oui 1 , X 2 + oui 2 , ... , X n + + oui n).
Espace vectoriel. N -espace vectoriel dimensionnel R. n est défini comme l'ensemble de tous les vecteurs à n dimensions pour lesquels les opérations de multiplication par des nombres réels et d'addition sont définies.
Illustration économique. Illustration économique de l'espace vectoriel à n dimensions : espace de marchandises (marchandises). Sous marchandises nous comprendrons un bien ou un service mis en vente à un certain moment et dans un certain endroit. Supposons qu'il existe un nombre fini n de biens disponibles ; les quantités de chacun d'entre elles achetées par le consommateur sont caractérisées par un ensemble de biens
X= (x 1 , x 2 , ..., x n),
où x i désigne le montant du i-ème bien acheté par le consommateur. Nous supposerons que tous les biens ont la propriété d’être divisibles arbitrairement, de sorte que toute quantité non négative de chacun d’eux puisse être achetée. Alors tous les ensembles de biens possibles sont des vecteurs de l'espace des biens C = ( X= (x 1 , x 2 , ... , x n) x je ≥ 0, je = ).
Indépendance linéaire.
Système e 1 , e 2 , ... , e m les vecteurs à n dimensions sont appelés linéairement dépendant, s'il existe de tels chiffresλ 1 , λ 2 , ... , λ m , dont au moins un est non nul, tel que l'égalitéλ 1 e 1 + λ2 e 2 +... + λ m e m = 0 ; sinon, ce système de vecteurs est appelé linéairement indépendant, c'est-à-dire que l'égalité indiquée n'est possible que dans le cas où tous ![]() . Signification géométrique dépendance linéaire vecteurs dans R. 3, interprétés comme des segments dirigés, expliquent les théorèmes suivants.
. Signification géométrique dépendance linéaire vecteurs dans R. 3, interprétés comme des segments dirigés, expliquent les théorèmes suivants.
Théorème 1. Un système constitué d'un vecteur est linéairement dépendant si et seulement si ce vecteur est nul.
Théorème 2. Pour que deux vecteurs soient linéairement dépendants, il faut et il suffit qu'ils soient colinéaires (parallèles).
Théorème 3 . Pour que trois vecteurs soient linéairement dépendants, il faut et il suffit qu’ils soient coplanaires (se trouvent dans le même plan).
Triples gauche et droit de vecteurs. Triple de vecteurs non coplanaires une, b, c appelé droite, si l'observateur de leur origine commune contourne les extrémités des vecteurs une, b, c dans l'ordre donné semble se produire dans le sens des aiguilles d'une montre. Sinon une, b, c -il en reste trois. Tous les triplets de vecteurs droits (ou gauches) sont appelés le même orienté.
Base et coordonnées. Troïka e 1, e 2 , e 3 vecteurs non coplanaires dans R. 3 s'appelle base, et les vecteurs eux-mêmes e 1, e 2 , e 3 - basique. N'importe quel vecteur un peut être développé de manière unique en vecteurs de base, c'est-à-dire représentés sous la forme
UN=x1 e 1+x2 e 2 + x3 e 3, (1.1)
les nombres x 1 , x 2 , x 3 dans le développement (1.1) sont appelés coordonnéesun dans la base e 1, e 2 , e 3 et sont désignés un(x1,x2,x3).
Base orthonormale. Si les vecteurs e 1, e 2 , e 3 sont perpendiculaires deux à deux et la longueur de chacun d'eux est égale à un, alors la base s'appelle orthonormé, et les coordonnées x 1 , x 2 , x 3 - rectangulaire. Les vecteurs de base d'une base orthonormée seront notés je, j, k.
Nous supposerons que dans l'espace R. 3 le système cartésien de droite est sélectionné Coordonnées rectangulaires {0, je, j, k}.
Oeuvre vectorielle. Oeuvre vectorielle UN vecteur b appelé vecteur c, qui est déterminé par les trois conditions suivantes :
1. Longueur du vecteur c numériquement égal à l'aire d'un parallélogramme construit sur des vecteurs un Et b, c'est à dire.
c=
|une||b| péché ( un^b).
2. Vecteur c perpendiculaire à chacun des vecteurs un Et b.
3. Vecteurs un, b Et c, pris dans l'ordre indiqué, forment un triplet droit.
Pour un produit croisé c la désignation est introduite c =[un B] ou
c = une
× b.
Si les vecteurs un Et b sont colinéaires, alors sin( un^b) = 0 et [ un B] = 0, en particulier, [ aa] = 0. Produits vectoriels de vecteurs unitaires : [ je]=k, [jk] = je, [ki]=j.
Si les vecteurs un Et b spécifié dans la base je, j, k coordonnées un(un 1 , un 2 , un 3), b(b 1, b 2, b 3), alors

Travail mixte. Si le produit vectoriel de deux vecteurs UN Et b multiplié de manière scalaire par le troisième vecteur c, alors un tel produit de trois vecteurs est appelé travail mixte et est indiqué par le symbole un avant JC.
Si les vecteurs un B Et c dans la base je, j, k donné par leurs coordonnées
un(un 1 , un 2 , un 3), b(b 1, b 2, b 3), c(c 1, c 2, c 3), alors
 .
.
Le produit mixte a une interprétation géométrique simple : c'est un scalaire, selon valeur absolueégal au volume d'un parallélépipède construit sur ces trois vecteurs.
Si les vecteurs forment un triplet droit, alors leur travail mixte il existe un nombre positif égal au volume spécifié ; si c'est un trois une, b, c - parti, alors abc<0 и V = - abc, donc V =|abc|.
Les coordonnées des vecteurs rencontrés dans les problèmes du premier chapitre sont supposées données par rapport à une base orthonormée droite. Vecteur unitaire codirectionnel avec le vecteur UN, indiqué par le symbole UN O. Symbole r=OM désigné par le rayon vecteur du point M, les symboles a, AB ou|une|, | AB|les modules de vecteurs sont notés UN Et UN B.
Exemple 1.2. Trouver l'angle entre les vecteurs un= 2m+4n Et b= m-n, Où m Et n- vecteurs unitaires et angle entre m Et négal à 120 o.
Solution. On a : cos φ = un B/un B ab =(2m+4n) (m-n) = 2m 2 - 4n 2 +2minute=
= 2 - 4+2cos120 o = - 2 + 2(-0,5) = -3 ; une = ; un 2 = (2m+4n) (2m+4n) =
= 4m 2 +16minute+16n 2 = 4+16(-0,5)+16=12, ce qui signifie a = . b = ; b 2 =
= (mn)(m-n) = m 2 -2minute+n 2 =
1-2(-0,5)+1 = 3, ce qui signifie b = . Finalement nous avons : parce queφ = = -1/2, φ = 120 o.
Exemple 1.3.Connaître les vecteurs UN B(-3,-2,6) et AVANT JC.(-2,4,4),calculez la longueur de l'altitude AD du triangle ABC.
Solution. En désignant l'aire du triangle ABC par S, on obtient :
S = 1/2 avant JC après JC. Alors AD=2S/BC, BC= = ![]() = 6,
= 6,
S = 1/2| AB ×CA|.
AC=AB+BC, ce qui signifie vecteur A.C. a des coordonnées
.
.
Exemple 1.4 . Deux vecteurs sont donnés un(11,10,2) et b(4,0,3). Trouver le vecteur unitaire c, orthogonal aux vecteurs un Et b et dirigé de telle sorte que le triplet ordonné de vecteurs une, b, cétait juste.
Solution.Notons les coordonnées du vecteur c par rapport à une base orthonormée droite donnée en termes de x, y, z.
Parce que le c ⊥ un, c ⊥b, Que Californie= 0,cb= 0. Selon les conditions du problème, il faut que c = 1 et abc >0.
Nous avons un système d'équations pour trouver x,y,z: 11x +10y + 2z = 0, 4x+3z=0, x 2 + y 2 + z 2 = 0.
A partir des première et deuxième équations du système, nous obtenons z = -4/3 x, y = -5/6 x. En substituant y et z dans la troisième équation, nous avons : x 2 = 36/125, d'où
X =±
. Utiliser la condition abc > 0, on obtient l'inégalité

En tenant compte des expressions pour z et y, on réécrit l'inégalité résultante sous la forme : 625/6 x > 0, ce qui implique que x>0. Donc, x = , y = - , z =- .
Définition. Le produit vectoriel du vecteur a (multiplicande) et d'un vecteur non colinéaire (multiplicande) est le troisième vecteur c (produit), qui est construit comme suit :
1) son module est numériquement égal à la superficie parallélogramme sur la Fig. 155), construit sur des vecteurs, c'est-à-dire qu'il est égal à la direction perpendiculaire au plan du parallélogramme mentionné ;
3) dans ce cas, la direction du vecteur c est choisie (parmi deux possibles) pour que les vecteurs c forment un système droitier (§ 110).
Désignation : ou
Ajout à la définition. Si les vecteurs sont colinéaires, alors en considérant la figure comme (conditionnellement) un parallélogramme, il est naturel d'attribuer une aire nulle. Par conséquent, le produit vectoriel des vecteurs colinéaires est considéré comme égal au vecteur nul.

Puisque le vecteur nul peut avoir n’importe quelle direction, cet accord ne contredit pas les paragraphes 2 et 3 de la définition.
Remarque 1. Dans le terme « produit vectoriel », le premier mot indique que le résultat de l'action est un vecteur (par opposition à produit scalaire; Épouser § 104, remarque 1).
Exemple 1. Trouvez le produit vectoriel où se trouvent les principaux vecteurs du système de coordonnées droit (Fig. 156).
1. Puisque les longueurs des vecteurs principaux sont égales à une unité d'échelle, l'aire du parallélogramme (carré) est numériquement égale à un. Cela signifie que le module du produit vectoriel est égal à un.
2. Puisque la perpendiculaire au plan est un axe, le produit vectoriel recherché est un vecteur colinéaire au vecteur k ; et comme les deux ont un module 1, le produit vectoriel souhaité est égal à k ou à -k.
3. Parmi ces deux vecteurs possibles, il faut choisir le premier, puisque les vecteurs k forment un système droitier (et les vecteurs un système gaucher).
Exemple 2. Trouver le produit vectoriel
Solution. Comme dans l’exemple 1, nous concluons que le vecteur est égal à k ou à -k. Mais maintenant nous devons choisir -k, puisque les vecteurs forment un système droitier (et les vecteurs forment un système gaucher). Donc,
Exemple 3. Les vecteurs ont des longueurs égales respectivement à 80 et 50 cm et forment un angle de 30°. En prenant le mètre comme unité de longueur, trouvez la longueur du produit vectoriel a

Solution. L'aire d'un parallélogramme construit sur des vecteurs est égale à La longueur du produit vectoriel souhaité est égale à
Exemple 4. Trouvez la longueur du produit vectoriel des mêmes vecteurs, en prenant les centimètres comme unité de longueur.
Solution. Puisque l'aire d'un parallélogramme construit sur des vecteurs est égale, la longueur du produit vectoriel est égale à 2000 cm, c'est-à-dire
D'une comparaison des exemples 3 et 4, il apparaît clairement que la longueur du vecteur dépend non seulement des longueurs des facteurs mais également du choix de l'unité de longueur.
Signification physique d'un produit vectoriel. Parmi les nombreuses grandeurs physiques représentées par le produit vectoriel, nous ne considérerons que le moment de force.
Soit A le point d'application de la force. Le moment de force par rapport au point O est appelé produit vectoriel. Puisque le module de ce produit vectoriel est numériquement égal à l'aire du parallélogramme (Fig. 157), alors le le module du moment est égal au produit de la base et de la hauteur, c'est-à-dire la force multipliée par la distance du point O à la droite le long de laquelle la force agit.
En mécanique il est prouvé que pour l'équilibre solide Il faut que non seulement la somme des vecteurs représentant les forces appliquées au corps soit égale à zéro, mais aussi la somme des moments de forces. Dans le cas où toutes les forces sont parallèles à un plan, l'addition de vecteurs représentant les moments peut être remplacée par l'addition et la soustraction de leurs grandeurs. Mais avec des directions de forces arbitraires, un tel remplacement est impossible. Conformément à cela, le produit vectoriel est défini précisément comme un vecteur et non comme un nombre.

7.1. Définition du produit croisé
Trois vecteurs non coplanaires a, b et c, pris dans l'ordre indiqué, forment un triplet droitier si, à partir de la fin du troisième vecteur c, le tour le plus court du premier vecteur a au deuxième vecteur b apparaît être dans le sens inverse des aiguilles d'une montre, et un triplet gaucher dans le sens des aiguilles d'une montre (voir Fig. . 16).
Le produit vectoriel du vecteur a et du vecteur b est appelé vecteur c, qui :
1. Perpendiculaire aux vecteurs a et b, c'est-à-dire c ^ a et c ^ b ;
2. A une longueur numériquement égale à l'aire d'un parallélogramme construit sur les vecteurs a etb comme sur les côtés (voir Fig. 17), c'est-à-dire
3. Les vecteurs a, b et c forment un triplet droitier.


Le produit vectoriel est noté a x b ou [a,b]. Les relations suivantes entre les vecteurs unitaires découlent directement de la définition du produit vectoriel, j Et k(voir fig. 18) :
je x j = k, j x k = je, k x je = j.
Montrons par exemple que je xj =k.
1) k ^ je, k ^ j ;
2) |k |=1, mais | je xj| = |je | |J | péché(90°)=1;
3) vecteurs i, j et k former un triple droit (voir Fig. 16).
7.2. Propriétés d'un produit vectoriel
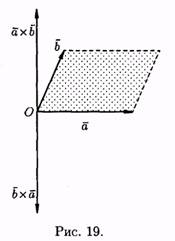
1. Lors de la réorganisation des facteurs, le produit vectoriel change de signe, c'est-à-dire et xb =(b xa) (voir Fig. 19).
Les vecteurs a xb et b xa sont colinéaires, ont les mêmes modules (l'aire du parallélogramme reste inchangée), mais sont de direction opposée (triples a, b, a xb et a, b, b x a d'orientation opposée). C'est axb = -(bxa).
2. Le produit vectoriel a une propriété de combinaison par rapport au facteur scalaire, c'est-à-dire l (a xb) = (l a) x b = a x (l b).
Soit l >0. Le vecteur l (a xb) est perpendiculaire aux vecteurs a et b. Vecteur ( je hache b est également perpendiculaire aux vecteurs a et b(vecteurs a, je mais se situent dans le même plan). Cela signifie que les vecteurs je(une xb) et ( je hache b colinéaire. Il est évident que leurs directions coïncident. Ils ont la même longueur :
C'est pourquoi je(une xb)= je un xb. On prouve de la même manière pour je<0.
3. Deux vecteurs non nuls a et b sont colinéaires si et seulement si leur produit vectoriel est égal au vecteur zéro, c'est-à-dire a ||b<=>et xb =0.

En particulier, i *i =j *j =k *k =0 .
4. Le produit vectoriel a la propriété de distribution :
(a+b) xc = une xc + b xs.
Nous accepterons sans justificatif.
7.3. Exprimer le produit vectoriel en termes de coordonnées
Nous utiliserons la table de produits vectoriels des vecteurs i, j et k :

si la direction du chemin le plus court du premier vecteur au deuxième coïncide avec la direction de la flèche, alors le produit est égal au troisième vecteur ; s'il ne coïncide pas, le troisième vecteur est pris avec un signe moins.
Soit deux vecteurs a =a x i +a y j+a z k et b =bx je+par j+bz k. Trouvons le produit vectoriel de ces vecteurs en les multipliant sous forme de polynômes (selon les propriétés du produit vectoriel) :

![]()
La formule résultante peut s’écrire encore plus brièvement :

puisque le côté droit de l'égalité (7.1) correspond au développement du déterminant du troisième ordre en termes d'éléments de la première rangée, l'égalité (7.2) est facile à retenir.
7.4. Quelques applications du produit croisé
Établir la colinéarité des vecteurs

Trouver l'aire d'un parallélogramme et d'un triangle
D'après la définition du produit vectoriel des vecteurs UN et B |a xb | =|une | * |b |sin g, c'est-à-dire S paires = |a x b |. Et donc D S =1/2|a x b |.
Détermination du moment de force autour d'un point
Soit une force appliquée au point A F =AB laisse tomber À PROPOS- un point dans l'espace (voir Fig. 20).

On sait en physique que moment de force F par rapport au point À PROPOS appelé vecteur M, qui passe par le point À PROPOS Et:
1) perpendiculaire au plan passant par les points O, A, B ;
2) numériquement égal au produit de la force par bras
3) forme un triplet droit avec les vecteurs OA et A B.
Par conséquent, M = OA x F.
Trouver la vitesse de rotation linéaire
Vitesse v point M d'un corps rigide tournant avec une vitesse angulaire w autour d’un axe fixe, est déterminé par la formule d’Euler v = w xr, où r = OM, où O est un point fixe de l’axe (voir Fig. 21).