Comment trouver la solution générale d'un système d'équations linéaires. Résolution de systèmes d'équations linéaires à l'aide de la méthode gaussienne
DANS cas général l'équation linéaire est :L'équation a une solution : si au moins un des coefficients des inconnues est différent de zéro. Dans ce cas, tout vecteur dimensionnel est appelé solution de l'équation si, en substituant ses coordonnées, l'équation devient une identité.
Caractéristiques générales du système d'équations résolu
Exemple 20.1Décrire le système d'équations.
![]()
Solution:
1. Y-a-t-il une équation contradictoire ?(Si les coefficients, dans ce cas l'équation a la forme : et s'appelle controversé.)
- Si un système contient quelque chose de contradictoire, alors un tel système est incohérent et n’a pas de solution.
2. Trouver toutes les variables autorisées. (L'inconnu s'appellepermis pour un système d'équations, s'il est inclus dans l'une des équations du système avec un coefficient de +1, mais n'est pas inclus dans les équations restantes (c'est-à-dire qu'il est inclus avec un coefficient égal à zéro).
3. Le système d'équations est-il résolu ? (Le système d'équations est dit résolu, si chaque équation du système contient une inconnue résolue, parmi laquelle il n'y en a pas de coïncidence)
Dans le cas général, le système d’équations résolu a la forme :Les inconnues résolues, prises une dans chaque équation du système, forment ensemble complet d'inconnues résolues systèmes. (dans notre exemple, c'est)
Les inconnues autorisées incluses dans l'ensemble complet sont également appelées basique(), et non inclus dans l'ensemble - gratuit ().

A ce stade, l'essentiel est de comprendre de quoi il s'agit résolu inconnu(inclus dans la base et gratuit).
Général Particulier Solutions de base
Solution générale un système d'équations résolu est un ensemble d'expressions d'inconnues résolues à travers des termes libres et des inconnues libres :

Décision privée s'appelle une solution obtenue à partir d'une solution générale pour des valeurs spécifiques de variables libres et d'inconnues.
Solution basique est une solution particulière obtenue à partir de la solution générale pour les valeurs nulles des variables libres.
- La solution de base (vecteur) s'appelle dégénérer, si le nombre de ses coordonnées est différent de zéro, moins de nombre inconnues résolues.
- La solution de base s'appelle non dégénéré, si le nombre de ses coordonnées non nulles est égal au nombre d'inconnues autorisées du système inclus dans l'ensemble complet.
Exemple 1. Trouver la solution générale, fondamentale et toute solution particulière du système d'équations :Théorème (1)
Le système d'équations résolu est toujours cohérent(car il a au moins une solution) ; De plus, si le système ne possède pas d’inconnues libres,(c'est-à-dire que dans un système d'équations, toutes celles autorisées sont incluses dans la base) alors c'est défini(a une solution unique); s'il y a au moins une variable libre, alors le système n'est pas défini(a un nombre infini de solutions).
![]()
Solution:
1. Est-ce qu'on vérifie si le système est autorisé ?
- Le système est résolu (puisque chacune des équations contient une inconnue résolue)
2. Nous incluons les inconnues autorisées dans l'ensemble - une pour chaque équation.
3. Écrivons-le décision commune en fonction des inconnues autorisées que nous avons incluses dans l'ensemble.

4. Trouver une solution privée. Pour ce faire, nous assimilons les variables libres que nous n'avons pas incluses dans l'ensemble à des nombres arbitraires.
![]()
Répondre: solution privée(une des options)
5. Trouver la solution de base. Pour ce faire, nous assimilons à zéro les variables libres que nous n'avons pas incluses dans l'ensemble.
Transformations élémentaires d'équations linéaires
Systèmes équations linéaires sont réduits à des systèmes résolus équivalents à l’aide de transformations élémentaires.
Théorème (2)
Si seulement multiplier l'équation du système par un nombre non nul, et laissez le reste des équations inchangé, alors . (c'est-à-dire que si vous multipliez les côtés gauche et droit de l'équation par le même nombre, vous obtenez une équation équivalente à celle-ci)
Théorème (3)
Si en ajouter un autre à n'importe quelle équation du système, et laissez toutes les autres équations inchangées, alors on obtient un système équivalent à celui-ci. (c'est-à-dire que si vous ajoutez deux équations (en ajoutant leurs côtés gauche et droit), vous obtiendrez une équation équivalente aux données)
Corollaire des théorèmes (2 et 3)
Si ajouter une autre équation à une équation multipliée par un certain nombre, et laissez toutes les autres équations inchangées, alors on obtient un système équivalent à celui-ci.
Formules pour recalculer les coefficients du système
Si nous avons un système d’équations et que nous voulons le transformer en un système d’équations résolu, la méthode Jordan-Gauss nous y aidera.
La Jordanie se transforme avec un élément résolvant permet d'obtenir pour un système d'équations l'inconnue résolue dans l'équation de nombre . (exemple 2).
La transformation de Jordan se compose de transformations élémentaires de deux types :Disons que nous voulons faire de l'inconnue de l'équation inférieure une inconnue résolue. Pour ce faire, il faut diviser par , pour que la somme soit .
Exemple 2 Recalculons les coefficients du système
Lors de la division d'une équation avec un nombre par , ses coefficients sont recalculés à l'aide des formules :
![]()
Pour exclure de l'équation avec le nombre , vous devez multiplier l'équation avec le nombre par et ajouter à cette équation.
Théorème (4) Sur la réduction du nombre d'équations du système.
Si un système d'équations contient une équation triviale, alors elle peut être exclue du système et un système équivalent à celui d'origine sera obtenu.
Théorème (5) Sur l'incompatibilité du système d'équations.
Si un système d’équations contient une équation incohérente, alors elle est incohérente.
Algorithme de la méthode Jordan-Gauss
L'algorithme de résolution de systèmes d'équations à l'aide de la méthode Jordan-Gauss comprend un certain nombre d'étapes similaires, à chacune desquelles les actions sont effectuées dans l'ordre suivant :
- Vérifie si le système est incohérent. Si un système contient une équation incohérente, alors il est incohérent.
- La possibilité de réduire le nombre d'équations est vérifiée. Si le système contient une équation triviale, elle est barrée.
- Si le système d'équations est résolu, notez la solution générale du système et, si nécessaire, les solutions particulières.
- Si le système n'est pas résolu, alors dans une équation qui ne contient pas d'inconnue résolue, un élément de résolution est sélectionné et une transformation de Jordan est effectuée avec cet élément.
- Revenez ensuite au point 1
Trouver: deux solutions générales et deux solutions de base correspondantes

Solution:
Les calculs sont présentés dans le tableau ci-dessous :
À droite du tableau se trouvent les actions sur les équations. Les flèches indiquent à quelle équation l'équation avec l'élément de résolution est ajoutée, multipliée par un facteur approprié.

Les trois premières lignes du tableau contiennent les coefficients des inconnues et les membres de droite du système d'origine. Les résultats de la première transformée de Jordan avec un élément résolvant égal à un sont donnés aux lignes 4, 5, 6. Les résultats de la deuxième transformée de Jordan avec un élément résolvant égal à (-1) sont donnés aux lignes 7, 8, 9. La troisième équation étant triviale, elle ne peut pas être considérée.
Le maintien de votre vie privée est important pour nous. Pour cette raison, nous avons développé une politique de confidentialité qui décrit la manière dont nous utilisons et stockons vos informations. Veuillez consulter nos pratiques de confidentialité et faites-nous savoir si vous avez des questions.
Collecte et utilisation des informations personnelles
Les informations personnelles font référence aux données qui peuvent être utilisées pour identifier ou contacter une personne spécifique.
Il peut vous être demandé de fournir vos informations personnelles à tout moment lorsque vous nous contactez.
Vous trouverez ci-dessous quelques exemples des types d'informations personnelles que nous pouvons collecter et de la manière dont nous pouvons utiliser ces informations.
Quelles informations personnelles collectons-nous :
- Lorsque vous soumettez une demande sur le site, nous pouvons collecter diverses informations, y compris votre nom, votre numéro de téléphone et votre adresse E-mail etc.
Comment utilisons-nous vos informations personnelles:
- Collecté par nos soins informations personnelles nous permet de vous contacter et de vous informer offres uniques, promotions et autres événements et événements à venir.
- De temps en temps, nous pouvons utiliser vos informations personnelles pour envoyer des notifications et des communications importantes.
- Nous pouvons également utiliser des informations personnelles à des fins internes telles que l'audit, l'analyse des données et diverses études afin d'améliorer les services que nous proposons et de vous fournir des recommandations concernant nos services.
- Si vous participez à un tirage au sort, un concours ou une promotion similaire, nous pouvons utiliser les informations que vous fournissez pour administrer ces programmes.
Divulgation d'informations à des tiers
Nous ne divulguons pas les informations reçues de votre part à des tiers.
Des exceptions:
- Si nécessaire - conformément à la loi, à la procédure judiciaire, aux procédures judiciaires et/ou sur la base de demandes publiques ou de demandes de organismes gouvernementaux sur le territoire de la Fédération de Russie - divulguez vos informations personnelles. Nous pouvons également divulguer des informations vous concernant si nous déterminons qu'une telle divulgation est nécessaire ou appropriée à des fins de sécurité, d'application de la loi ou à d'autres fins de santé publique. cas importants.
- En cas de réorganisation, de fusion ou de vente, nous pouvons transférer les informations personnelles que nous collectons au tiers successeur concerné.
Protection des informations personnelles
Nous prenons des précautions - notamment administratives, techniques et physiques - pour protéger vos informations personnelles contre la perte, le vol et l'utilisation abusive, ainsi que contre l'accès, la divulgation, l'altération et la destruction non autorisés.
Respecter votre vie privée au niveau de l'entreprise
Pour garantir la sécurité de vos informations personnelles, nous communiquons les normes de confidentialité et de sécurité à nos employés et appliquons strictement les pratiques de confidentialité.
Solution de systèmes linéaires équations algébriques(SLAE) est sans aucun doute le sujet le plus important du cours d’algèbre linéaire. Un grand nombre de problèmes dans toutes les branches des mathématiques se résument à la résolution de systèmes d'équations linéaires. Ces facteurs expliquent la raison de cet article. Le matériel de l'article est sélectionné et structuré de manière à ce qu'avec son aide vous puissiez
- choisissez la méthode optimale pour résoudre votre système d'équations algébriques linéaires,
- étudier la théorie de la méthode choisie,
- résolvez votre système d'équations linéaires en considérant des solutions détaillées à des exemples et des problèmes typiques.
Brève description du matériel de l'article.
Tout d’abord, nous donnons toutes les définitions et concepts nécessaires et introduisons les notations.
Ensuite, nous considérerons des méthodes de résolution de systèmes d'équations algébriques linéaires dans lesquelles le nombre d'équations est égal au nombre de variables inconnues et qui ont une solution unique. Premièrement, nous nous concentrerons sur la méthode de Cramer, deuxièmement, nous montrerons la méthode matricielle pour résoudre de tels systèmes d'équations, troisièmement, nous analyserons la méthode de Gauss (méthode élimination séquentielle variables inconnues). Pour consolider la théorie, nous allons certainement résoudre plusieurs SLAE de différentes manières.
Après cela, nous passerons à la résolution de systèmes d'équations algébriques linéaires vue générale, dans lequel le nombre d'équations ne coïncide pas avec le nombre de variables inconnues ou la matrice principale du système est singulière. Formulons le théorème de Kronecker-Capelli, qui permet d'établir la compatibilité des SLAE. Analysons la solution des systèmes (s'ils sont compatibles) en utilisant le concept mineur de base matrices. Nous considérerons également la méthode de Gauss et décrirons en détail les solutions aux exemples.
Nous nous attarderons certainement sur la structure de la solution générale des systèmes homogènes et inhomogènes d'équations algébriques linéaires. Donnons le concept de système fondamental de solutions et montrons comment la solution générale d'un SLAE s'écrit en utilisant les vecteurs du système fondamental de solutions. Pour une meilleure compréhension, regardons quelques exemples.
En conclusion, nous examinerons les systèmes d'équations qui peuvent être réduits à des systèmes linéaires, ainsi que divers problèmes dans la solution desquels se posent les SLAE.
Navigation dans les pages.
Définitions, concepts, désignations.
Nous considérerons des systèmes de p équations algébriques linéaires à n variables inconnues (p peut être égal à n) de la forme
Variables inconnues - coefficients (certains réels ou nombres complexes), - termes libres (également nombres réels ou complexes).
Cette forme d'enregistrement SLAE est appelée coordonner.
DANS forme matricielle l'écriture de ce système d'équations a la forme,
Où  - la matrice principale du système, - une matrice colonnes de variables inconnues, - une matrice colonnes de termes libres.
- la matrice principale du système, - une matrice colonnes de variables inconnues, - une matrice colonnes de termes libres.
Si nous ajoutons une colonne-matrice de termes libres à la matrice A comme (n+1)ième colonne, nous obtenons ce qu'on appelle matrice étendue systèmes d'équations linéaires. Généralement, une matrice étendue est désignée par la lettre T et la colonne de termes libres est séparée par une ligne verticale des colonnes restantes, c'est-à-dire 
Résolution d'un système d'équations algébriques linéaires appelé un ensemble de valeurs de variables inconnues qui transforme toutes les équations du système en identités. Équation matricielle car des valeurs données des variables inconnues deviennent également une identité.
Si un système d’équations a au moins une solution, alors on l’appelle articulation.
Si un système d’équations n’a pas de solutions, alors on l’appelle non conjoint.
Si un SLAE a une solution unique, alors on l'appelle certain; s'il y a plus d'une solution, alors – incertain.
Si les termes libres de toutes les équations du système sont égaux à zéro ![]() , alors le système s'appelle homogène, sinon - hétérogène.
, alors le système s'appelle homogène, sinon - hétérogène.
Résolution de systèmes élémentaires d'équations algébriques linéaires.
Si le nombre d'équations d'un système est égal au nombre de variables inconnues et que le déterminant de sa matrice principale n'est pas égal à zéro, alors ces SLAE seront appelés élémentaire. De tels systèmes d'équations ont une solution unique, et dans le cas système homogène toutes les variables inconnues sont nulles.
Nous avons commencé à étudier ces SLAE au lycée. Lors de leur résolution, nous avons pris une équation, exprimé une variable inconnue en termes d'autres et l'avons substituée dans les équations restantes, puis pris l'équation suivante, exprimé la variable inconnue suivante et l'avons substituée dans d'autres équations, et ainsi de suite. Ou bien ils ont utilisé la méthode d’addition, c’est-à-dire qu’ils ont ajouté deux équations ou plus pour éliminer certaines variables inconnues. Nous ne nous attarderons pas sur ces méthodes en détail, puisqu'il s'agit essentiellement de modifications de la méthode de Gauss.
Les principales méthodes de résolution de systèmes élémentaires d'équations linéaires sont la méthode de Cramer, la méthode matricielle et la méthode de Gauss. Trions-les.
Résolution de systèmes d'équations linéaires à l'aide de la méthode de Cramer.
Supposons que nous devions résoudre un système d'équations algébriques linéaires 
dans laquelle le nombre d'équations est égal au nombre de variables inconnues et le déterminant de la matrice principale du système est différent de zéro, c'est-à-dire .
Soit le déterminant de la matrice principale du système, et ![]() - les déterminants des matrices obtenues à partir de A par remplacement 1er, 2e, …, nième colonne respectivement à la colonne des membres libres :
- les déterminants des matrices obtenues à partir de A par remplacement 1er, 2e, …, nième colonne respectivement à la colonne des membres libres : 
Avec cette notation, les variables inconnues sont calculées en utilisant les formules de la méthode de Cramer comme  . C'est ainsi que l'on trouve la solution d'un système d'équations algébriques linéaires à l'aide de la méthode de Cramer.
. C'est ainsi que l'on trouve la solution d'un système d'équations algébriques linéaires à l'aide de la méthode de Cramer.
Exemple.
La méthode de Cramer  .
.
Solution.
La matrice principale du système a la forme  . Calculons son déterminant (si nécessaire, voir l'article) :
. Calculons son déterminant (si nécessaire, voir l'article) : 
Puisque le déterminant de la matrice principale du système est non nul, le système possède une solution unique qui peut être trouvée par la méthode de Cramer.
Composons et calculons les déterminants nécessaires ![]() (on obtient le déterminant en remplaçant la première colonne de la matrice A par une colonne de termes libres, le déterminant en remplaçant la deuxième colonne par une colonne de termes libres, et en remplaçant la troisième colonne de la matrice A par une colonne de termes libres) :
(on obtient le déterminant en remplaçant la première colonne de la matrice A par une colonne de termes libres, le déterminant en remplaçant la deuxième colonne par une colonne de termes libres, et en remplaçant la troisième colonne de la matrice A par une colonne de termes libres) : 
Trouver des variables inconnues à l'aide de formules  :
:
Répondre:
Le principal inconvénient de la méthode de Cramer (si on peut la qualifier d'inconvénient) est la complexité du calcul des déterminants lorsque le nombre d'équations dans le système est supérieur à trois.
Résolution de systèmes d'équations algébriques linéaires à l'aide de la méthode matricielle (en utilisant une matrice inverse).
Soit un système d'équations algébriques linéaires sous forme matricielle, où la matrice A a une dimension n par n et son déterminant est non nul.
Puisque , alors la matrice A est inversible, c'est-à-dire qu'elle existe matrice inverse. Si nous multiplions les deux côtés de l'égalité par la gauche, nous obtenons une formule pour trouver une matrice-colonne de variables inconnues. C'est ainsi que nous avons obtenu une solution d'un système d'équations algébriques linéaires en utilisant la méthode matricielle.
Exemple.
Résoudre un système d'équations linéaires méthode matricielle.
Solution.
Réécrivons le système d'équations sous forme matricielle : 
Parce que
alors le SLAE peut être résolu en utilisant la méthode matricielle. En utilisant la matrice inverse, la solution de ce système peut être trouvée comme  .
.
Construisons la matrice inverse en utilisant la matrice de ajouts algébriqueséléments de la matrice A (si nécessaire, voir article) : 
Il reste à calculer la matrice des variables inconnues en multipliant la matrice inverse  à une matrice-colonne de membres libres (si nécessaire, voir l'article) :
à une matrice-colonne de membres libres (si nécessaire, voir l'article) : 
Répondre:
 ou dans une autre notation x 1 = 4, x 2 = 0, x 3 = -1.
ou dans une autre notation x 1 = 4, x 2 = 0, x 3 = -1.
Le principal problème lors de la recherche de solutions à des systèmes d'équations algébriques linéaires à l'aide de la méthode matricielle est la complexité de trouver la matrice inverse, en particulier pour matrices carrées ordre supérieur au tiers.
Résolution de systèmes d'équations linéaires à l'aide de la méthode de Gauss.
Supposons que nous devions trouver une solution à un système de n équations linéaires avec n variables inconnues 
dont le déterminant de la matrice principale est différent de zéro.
L'essence de la méthode Gauss consiste à éliminer séquentiellement les variables inconnues : d'abord, x 1 est exclu de toutes les équations du système, à partir de la seconde, puis x 2 est exclu de toutes les équations, à partir de la troisième, et ainsi de suite, jusqu'à ce qu'il ne reste que la variable inconnue x n dans la dernière équation. Ce processus de transformation des équations du système pour éliminer séquentiellement les variables inconnues est appelé méthode gaussienne directe. Après avoir terminé le mouvement vers l'avant de la méthode gaussienne, x n est trouvé à partir de la dernière équation, en utilisant cette valeur de l'avant-dernière équation, x n-1 est calculé, et ainsi de suite, x 1 est trouvé à partir de la première équation. Le processus de calcul des variables inconnues lors du passage de la dernière équation du système à la première est appelé inverse de la méthode gaussienne.
Décrivons brièvement l'algorithme d'élimination des variables inconnues.
Nous supposerons cela, puisque nous pouvons toujours y parvenir en réorganisant les équations du système. Éliminons la variable inconnue x 1 de toutes les équations du système, en commençant par la seconde. Pour ce faire, à la deuxième équation du système on ajoute la première, multipliée par , à la troisième équation on ajoute la première, multipliée par , et ainsi de suite, à la nième équation on ajoute la première, multipliée par . Le système d'équations après de telles transformations prendra la forme 
où et  .
.
Nous serions arrivés au même résultat si nous avions exprimé x 1 en termes d'autres variables inconnues dans la première équation du système et substitué l'expression résultante dans toutes les autres équations. Ainsi, la variable x 1 est exclue de toutes les équations, à partir de la seconde.
Ensuite, nous procédons de la même manière, mais seulement avec une partie du système résultant, qui est marquée sur la figure 
Pour ce faire, à la troisième équation du système on ajoute la seconde, multipliée par , à la quatrième équation on ajoute la seconde, multipliée par , et ainsi de suite, à la nième équation on ajoute la seconde, multipliée par . Le système d'équations après de telles transformations prendra la forme 
où et  . Ainsi, la variable x 2 est exclue de toutes les équations, à partir de la troisième.
. Ainsi, la variable x 2 est exclue de toutes les équations, à partir de la troisième.
Ensuite, nous procédons à l'élimination de l'inconnu x 3, tandis que nous agissons de la même manière avec la partie du système marquée sur la figure 
On continue donc la progression directe de la méthode gaussienne jusqu'à ce que le système prenne la forme 
A partir de ce moment on commence l'inverse de la méthode gaussienne : on calcule x n à partir de la dernière équation comme , en utilisant la valeur obtenue de x n on trouve x n-1 à partir de l'avant-dernière équation, et ainsi de suite, on trouve x 1 à partir de la première équation .
Exemple.
Résoudre un système d'équations linéaires Méthode Gauss.
Solution.
Excluons la variable inconnue x 1 des deuxième et troisième équations du système. Pour ce faire, aux deux côtés des deuxième et troisième équations, nous ajoutons les parties correspondantes de la première équation, multipliées respectivement par et par : 
Maintenant, nous éliminons x 2 de la troisième équation en ajoutant à ses côtés gauche et droit les côtés gauche et droit de la deuxième équation, multipliés par : 
Ceci termine le mouvement vers l'avant de la méthode de Gauss ; nous commençons le mouvement vers l'arrière.
A partir de la dernière équation du système d'équations résultant, nous trouvons x 3 : 
De la deuxième équation, nous obtenons .
À partir de la première équation, nous trouvons la variable inconnue restante et complétons ainsi l'inverse de la méthode de Gauss.
Répondre:
X 1 = 4, x 2 = 0, x 3 = -1.
Résolution de systèmes d'équations algébriques linéaires de forme générale.
En général, le nombre d'équations du système p ne coïncide pas avec le nombre de variables inconnues n :
De tels SLAE peuvent n’avoir aucune solution, avoir une seule solution ou avoir une infinité de solutions. Cette affirmation s'applique également aux systèmes d'équations dont la matrice principale est carrée et singulière.
Théorème de Kronecker-Capelli.
Avant de trouver une solution à un système d’équations linéaires, il est nécessaire d’établir sa compatibilité. La réponse à la question de savoir quand SLAE est compatible et quand elle est incohérente est donnée par Théorème de Kronecker-Capelli:
Pour qu'un système de p équations à n inconnues (p peut être égal à n) soit cohérent, il faut et suffisant que le rang de la matrice principale du système soit égal au rang de la matrice étendue, c'est-à-dire , Rang(A)=Rang(T).
Considérons, à titre d'exemple, l'application du théorème de Kronecker-Capelli pour déterminer la compatibilité d'un système d'équations linéaires.
Exemple.
Découvrez si le système d'équations linéaires a  solutions.
solutions.
Solution.
 . Utilisons la méthode des mineurs limitrophes. Mineur du second ordre
. Utilisons la méthode des mineurs limitrophes. Mineur du second ordre  différent de zéro. Regardons les mineurs de troisième ordre qui le bordent :
différent de zéro. Regardons les mineurs de troisième ordre qui le bordent : 
Puisque tous les mineurs limitrophes du troisième ordre sont égaux à zéro, le rang de la matrice principale est égal à deux.
À son tour, le rang de la matrice étendue  est égal à trois, puisque le mineur est du troisième ordre
est égal à trois, puisque le mineur est du troisième ordre 
différent de zéro.
Ainsi, Rang(A), donc, en utilisant le théorème de Kronecker-Capelli, nous pouvons conclure que le système original d'équations linéaires est incohérent.
Répondre:
Le système n'a pas de solutions.
Nous avons donc appris à établir l'incohérence d'un système en utilisant le théorème de Kronecker-Capelli.
Mais comment trouver une solution à un SLAE si sa compatibilité est établie ?
Pour ce faire, nous avons besoin du concept de base mineure d’une matrice et d’un théorème sur le rang d’une matrice.
Mineure ordre le plus élevé la matrice A, différente de zéro, est appelée basique.
De la définition d'une base mineure il résulte que son ordre est égal au rang de la matrice. Pour une matrice A non nulle il peut y avoir plusieurs bases mineures ; il y a toujours une base mineure.
Par exemple, considérons la matrice  .
.
Tous les mineurs du troisième ordre de cette matrice sont égaux à zéro, puisque les éléments de la troisième ligne de cette matrice sont la somme des éléments correspondants des première et deuxième lignes.
Les mineurs de second ordre suivants sont basiques, car non nuls 
Mineurs  ne sont pas basiques, puisqu’ils sont égaux à zéro.
ne sont pas basiques, puisqu’ils sont égaux à zéro.
Théorème du rang matriciel.
Si le rang d'une matrice d'ordre p par n est égal à r, alors tous les éléments de ligne (et de colonne) de la matrice qui ne forment pas la base mineure choisie sont exprimés linéairement en termes d'éléments de ligne (et de colonne) correspondants formant la base mineure.
Que nous dit le théorème du rang matriciel ?
Si, selon le théorème de Kronecker-Capelli, nous avons établi la compatibilité du système, alors nous choisissons n'importe quelle base mineure de la matrice principale du système (son ordre est égal à r), et excluons du système toutes les équations qui font ne constitue pas la base mineure sélectionnée. Le SLAE ainsi obtenu sera équivalent à l'original, puisque les équations rejetées sont toujours redondantes (selon le théorème du rang matriciel, elles sont une combinaison linéaire des équations restantes).
En conséquence, après avoir écarté les équations inutiles du système, deux cas sont possibles.
Si le nombre d'équations r dans le système résultant est égal au nombre de variables inconnues, alors il sera définitif et la seule solution pourra être trouvée par la méthode de Cramer, la méthode matricielle ou la méthode de Gauss.
Exemple.
 .
.
Solution.
Rang de la matrice principale du système  est égal à deux, puisque le mineur est du second ordre
est égal à deux, puisque le mineur est du second ordre  différent de zéro. Rang matriciel étendu
différent de zéro. Rang matriciel étendu  est également égal à deux, puisque le seul mineur du troisième ordre est zéro
est également égal à deux, puisque le seul mineur du troisième ordre est zéro 
et le mineur du second ordre considéré ci-dessus est différent de zéro. Sur la base du théorème de Kronecker-Capelli, nous pouvons affirmer la compatibilité du système original d'équations linéaires, puisque Rang(A)=Rang(T)=2.
Comme base mineure nous prenons . Il est formé des coefficients des première et deuxième équations : 
La troisième équation du système ne participe pas à la formation de la base mineure, on l'exclut donc du système basé sur le théorème sur le rang de la matrice : 
C'est ainsi que nous avons obtenu un système élémentaire d'équations algébriques linéaires. Résolvons-le en utilisant la méthode de Cramer : 
Répondre:
x1 = 1, x2 = 2.
Si le nombre d'équations r dans le SLAE résultant est inférieur au nombre de variables inconnues n, alors sur les côtés gauches des équations, nous laissons les termes qui forment la base mineure et nous transférons les termes restants vers les côtés droits du équations du système de signe opposé.
Les variables inconnues (r d'entre elles) restant sur les côtés gauches des équations sont appelées principal.
Les variables inconnues (il y a n - r pièces) qui se trouvent sur les côtés droits sont appelées gratuit.
Nous pensons maintenant que les variables inconnues libres peuvent prendre des valeurs arbitraires, tandis que les r variables inconnues principales seront exprimées à travers des variables inconnues libres d'une manière unique. Leur expression peut être trouvée en résolvant le SLAE résultant en utilisant la méthode de Cramer, la méthode matricielle ou la méthode de Gauss.
Regardons cela avec un exemple.
Exemple.
Résoudre un système d'équations algébriques linéaires  .
.
Solution.
Trouvons le rang de la matrice principale du système  par la méthode des mineurs limitrophes. Prenons un 1 1 = 1 comme mineur non nul du premier ordre. Commençons par rechercher un mineur non nul du second ordre limitrophe de ce mineur :
par la méthode des mineurs limitrophes. Prenons un 1 1 = 1 comme mineur non nul du premier ordre. Commençons par rechercher un mineur non nul du second ordre limitrophe de ce mineur : 
C’est ainsi que nous avons trouvé un mineur non nul du second ordre. Commençons par rechercher un mineur non nul du troisième ordre : 
Ainsi, le rang de la matrice principale est de trois. Le rang de la matrice étendue est également égal à trois, c'est-à-dire que le système est cohérent.
Nous prenons comme base le mineur non nul trouvé du troisième ordre.
Pour plus de clarté, nous montrons les éléments qui constituent la base mineure : 
Nous laissons les termes impliqués dans la base mineure du côté gauche des équations du système, et transférons le reste avec des signes opposés vers les côtés droits : 
Donnons aux variables inconnues libres x 2 et x 5 des valeurs arbitraires, c'est-à-dire que nous acceptons ![]() , où sont des nombres arbitraires. Dans ce cas, le SLAE prendra la forme
, où sont des nombres arbitraires. Dans ce cas, le SLAE prendra la forme 
Résolvons le système élémentaire d’équations algébriques linéaires résultant en utilisant la méthode de Cramer : 
Ainsi, .
Dans votre réponse, n'oubliez pas d'indiquer les variables inconnues libres.
Répondre:
Où sont les nombres arbitraires.
Résumer.
Pour résoudre un système d’équations algébriques linéaires générales, nous déterminons d’abord sa compatibilité à l’aide du théorème de Kronecker – Capelli. Si le rang de la matrice principale n'est pas égal au rang de la matrice étendue, alors on conclut que le système est incompatible.
Si le rang de la matrice principale est égal au rang de la matrice étendue, alors on sélectionne une base mineure et écarte les équations du système qui ne participent pas à la formation de la base mineure sélectionnée.
Si l'ordre de la base mineure est égal au nombre de variables inconnues, alors le SLAE a une solution unique, qui peut être trouvée par n'importe quelle méthode que nous connaissons.
Si l'ordre de la base mineure est inférieur au nombre de variables inconnues, alors sur le côté gauche des équations du système, nous laissons les termes avec les principales variables inconnues, transférons les termes restants vers la droite et donnons des valeurs arbitraires à les variables inconnues libres. A partir du système d'équations linéaires résultant, nous trouvons les principales inconnues en utilisant la méthode de Cramer, la méthode matricielle ou la méthode de Gauss.
Méthode de Gauss pour résoudre des systèmes d'équations algébriques linéaires de forme générale.
La méthode de Gauss peut être utilisée pour résoudre des systèmes d’équations algébriques linéaires de toute nature sans tester au préalable leur cohérence. Le processus d'élimination séquentielle des variables inconnues permet de conclure à la fois sur la compatibilité et l'incompatibilité du SLAE, et si une solution existe, il permet de la trouver.
D'un point de vue informatique, la méthode gaussienne est préférable.
Regarde ça Description détaillée et analysé des exemples dans l'article la méthode de Gauss pour résoudre des systèmes d'équations algébriques linéaires de forme générale.
Écrire une solution générale à des systèmes algébriques linéaires homogènes et inhomogènes en utilisant les vecteurs du système fondamental de solutions.
Dans cette section, nous parlerons de systèmes simultanés homogènes et inhomogènes d'équations algébriques linéaires qui ont un nombre infini de solutions.
Traitons d'abord des systèmes homogènes.
Système fondamental de solutions un système homogène de p équations algébriques linéaires avec n variables inconnues est un ensemble de (n – r) solutions linéairement indépendantes de ce système, où r est l'ordre de la base mineure de la matrice principale du système.
Si nous désignons les solutions linéairement indépendantes d'un SLAE homogène comme X (1) , X (2) , ..., X (n-r) (X (1) , X (2) , ..., X (n-r) sont en colonnes matrices de dimension n par 1) , alors la solution générale de ce système homogène est représentée comme une combinaison linéaire de vecteurs du système fondamental de solutions avec arbitraire coefficients constants C 1, C 2, ..., C (n-r), c'est-à-dire .
Que signifie le terme solution générale d'un système homogène d'équations algébriques linéaires (oroslau) ?
Le sens est simple : la formule définit tout solutions possibles le SLAE d'origine, en d'autres termes, en prenant n'importe quel ensemble de valeurs de constantes arbitraires C 1, C 2, ..., C (n-r), en utilisant la formule, nous obtiendrons l'une des solutions du SLAE homogène d'origine.
Ainsi, si nous trouvons un système fondamental de solutions, alors nous pouvons définir toutes les solutions de ce SLAE homogène comme .
Montrons le processus de construction d'un système fondamental de solutions à un SLAE homogène.
Nous sélectionnons la base mineure du système original d'équations linéaires, excluons toutes les autres équations du système et transférons tous les termes contenant des variables inconnues libres vers les membres droits des équations du système de signes opposés. Donnons aux variables inconnues libres les valeurs 1,0,0,...,0 et calculons les principales inconnues en résolvant le système élémentaire d'équations linéaires résultant de n'importe quelle manière, par exemple en utilisant la méthode Cramer. Cela donnera X (1) - la première solution du système fondamental. Si nous donnons aux inconnues libres les valeurs 0,1,0,0,…,0 et calculons les principales inconnues, nous obtenons X (2) . Et ainsi de suite. Si nous attribuons les valeurs 0,0,…,0,1 aux variables inconnues libres et calculons les principales inconnues, nous obtenons X (n-r) . De cette manière, un système fondamental de solutions à un SLAE homogène sera construit et sa solution générale pourra s'écrire sous la forme .
Pour les systèmes inhomogènes d'équations algébriques linéaires, la solution générale est représentée sous la forme , où est la solution générale du système homogène correspondant, et est la solution particulière du SLAE inhomogène original, que nous obtenons en donnant aux inconnues libres les valeurs 0,0,...,0 et calcul des valeurs des principales inconnues.
Regardons des exemples.
Exemple.
Trouver le système fondamental de solutions et la solution générale d'un système homogène d'équations algébriques linéaires  .
.
Solution.
Le rang de la matrice principale des systèmes homogènes d'équations linéaires est toujours égal au rang de la matrice étendue. Trouvons le rang de la matrice principale en utilisant la méthode des mineurs limitrophes. Comme mineur non nul du premier ordre, on prend l'élément a 1 1 = 9 de la matrice principale du système. Trouvons le mineur limite non nul du deuxième ordre : 
Un mineur du second ordre, différent de zéro, a été retrouvé. Parcourons les mineurs du troisième ordre qui le bordent à la recherche d'un non nul : 
Tous les mineurs limitrophes du troisième ordre sont égaux à zéro, donc le rang de la matrice principale et étendue est égal à deux. Prenons . Pour plus de clarté, notons les éléments du système qui le composent : 
La troisième équation du SLAE original ne participe pas à la formation de la base mineure, elle peut donc être exclue : 
On laisse les termes contenant les principales inconnues du côté droit des équations, et on transfère les termes à inconnues libres du côté droit :
Construisons un système fondamental de solutions au système homogène original d'équations linéaires. Système fondamental Les solutions de ce SLAE consistent à deux solutions, puisque le SLAE original contient quatre variables inconnues, et l'ordre de sa base mineure est égal à deux. Pour trouver X (1), on donne aux inconnues libres les valeurs x 2 = 1, x 4 = 0, puis on trouve les principales inconnues du système d'équations  .
.
Cependant, dans la pratique, deux autres cas sont répandus :
– Le système est incohérent (n'a pas de solutions) ;
– Le système est cohérent et propose une infinité de solutions.
Note : Le terme « cohérence » implique que le système a au moins une certaine solution. Dans un certain nombre de problèmes, il est nécessaire d'examiner d'abord la compatibilité du système ; comment procéder, voir l'article sur rang des matrices.
Pour ces systèmes, la plus universelle de toutes les méthodes de solution est utilisée - Méthode gaussienne. En fait, la méthode « scolaire » conduira également à la réponse, mais en mathématiques supérieures, il est d'usage d'utiliser la méthode gaussienne d'élimination séquentielle des inconnues. Ceux qui ne sont pas familiers avec l'algorithme de la méthode gaussienne, veuillez d'abord étudier la leçon Méthode gaussienne pour les nuls.
Les transformations matricielles élémentaires elles-mêmes sont exactement les mêmes, la différence sera dans la fin de la solution. Tout d'abord, regardons quelques exemples où le système n'a pas de solutions (incohérentes).
Exemple 1
Qu’est-ce qui attire immédiatement l’attention dans ce système ? Le nombre d'équations est inférieur au nombre de variables. Si le nombre d'équations est inférieur au nombre de variables, alors nous pouvons immédiatement dire que le système est soit incohérent, soit qu'il a une infinité de solutions. Et il ne reste plus qu'à le découvrir.
Le début de la solution est tout à fait ordinaire - nous écrivons la matrice étendue du système et, à l'aide de transformations élémentaires, la mettons sous une forme pas à pas :
![]()
(1) Sur l’étape en haut à gauche, nous devons obtenir +1 ou –1. Il n'y a pas de tels nombres dans la première colonne, donc réorganiser les lignes ne donnera rien. L'unité devra s'organiser, et cela peut se faire de plusieurs manières. J'ai fait ceci : à la première ligne, nous ajoutons la troisième ligne, multipliée par -1.
(2) Nous obtenons maintenant deux zéros dans la première colonne. À la deuxième ligne, nous ajoutons la première ligne multipliée par 3. À la troisième ligne, nous ajoutons la première ligne multipliée par 5.
(3) Une fois la transformation terminée, il est toujours conseillé de voir s'il est possible de simplifier les chaînes résultantes ? Peut. Nous divisons la deuxième ligne par 2, obtenant en même temps le –1 requis à la deuxième étape. Divisez la troisième ligne par –3.
(4) Ajoutez la deuxième ligne à la troisième ligne.
Tout le monde a probablement remarqué la mauvaise ligne résultant de transformations élémentaires : ![]() . Il est clair qu’il ne peut en être ainsi. En effet, réécrivons la matrice résultante
. Il est clair qu’il ne peut en être ainsi. En effet, réécrivons la matrice résultante ![]() revenons au système d’équations linéaires :
revenons au système d’équations linéaires : ![]()
Si, à la suite de transformations élémentaires, une chaîne de la forme est obtenue, où est un nombre différent de zéro, alors le système est incohérent (n'a pas de solutions).
Comment écrire la fin d’une tâche ? Dessinons à la craie blanche : « à la suite de transformations élémentaires, une chaîne de la forme , où » est obtenue et donnons la réponse : le système n'a pas de solutions (incohérent).
Si, selon la condition, il est nécessaire de RECHERCHER la compatibilité du système, alors il est nécessaire de formaliser la solution dans un style plus solide en utilisant le concept rang matriciel et théorème de Kronecker-Capelli.
Veuillez noter qu'il n'y a pas d'inversion de l'algorithme gaussien ici - il n'y a pas de solutions et il n'y a tout simplement rien à trouver.
Exemple 2
Résoudre un système d'équations linéaires ![]()
Ceci est un exemple pour décision indépendante. Solution complète et la réponse à la fin de la leçon. Je vous rappelle encore que votre solution peut différer de la mienne ; l'algorithme gaussien n'a pas une forte « rigidité ».
Un autre caractéristique technique solutions : les transformations élémentaires peuvent être stoppées Immediatement, dès qu'une ligne comme , où . Considérons exemple conditionnel: supposons qu'après la première transformation la matrice soit obtenue ![]() . La matrice n'a pas encore été réduite à une forme échelonnée, mais il n'est pas nécessaire de procéder à d'autres transformations élémentaires, puisqu'une ligne de la forme est apparue, où . Il faut immédiatement répondre que le système est incompatible.
. La matrice n'a pas encore été réduite à une forme échelonnée, mais il n'est pas nécessaire de procéder à d'autres transformations élémentaires, puisqu'une ligne de la forme est apparue, où . Il faut immédiatement répondre que le système est incompatible.
Lorsqu'un système d'équations linéaires n'a pas de solution, c'est presque un cadeau, car une solution courte est obtenue, parfois littéralement en 2-3 étapes.
Mais tout dans ce monde est équilibré, et un problème dans lequel le système a une infinité de solutions n’est que plus long.
Exemple 3
Résoudre un système d'équations linéaires ![]()
Il y a 4 équations et 4 inconnues, donc le système peut soit avoir une seule solution, soit n'avoir aucune solution, soit avoir une infinité de solutions. Quoi qu’il en soit, la méthode gaussienne nous amènera de toute façon à la réponse. C'est sa polyvalence.
Le début est à nouveau standard. Écrivons la matrice étendue du système et, à l'aide de transformations élémentaires, mettons-la sous une forme pas à pas : ![]()
C'est tout, et tu avais peur.
(1) Veuillez noter que tous les nombres de la première colonne sont divisibles par 2, donc 2 convient parfaitement sur l'étape en haut à gauche. À la deuxième ligne, nous ajoutons la première ligne, multipliée par –4. À la troisième ligne, nous ajoutons la première ligne, multipliée par –2. À la quatrième ligne, nous ajoutons la première ligne, multipliée par –1.
Attention! Beaucoup pourraient être tentés par la quatrième ligne soustraire Première ligne. Cela peut être fait, mais ce n'est pas nécessaire : l'expérience montre que la probabilité d'erreur dans les calculs augmente plusieurs fois. Ajoutez simplement : à la quatrième ligne, ajoutez la première ligne multipliée par –1 – exactement!
(2) Les trois dernières lignes sont proportionnelles, deux d'entre elles peuvent être supprimées.
Là encore, nous devons montrer attention accrue, mais les lignes sont-elles vraiment proportionnelles ? Par mesure de sécurité (surtout pour une théière), ce serait une bonne idée de multiplier la deuxième ligne par –1, et de diviser la quatrième ligne par 2, ce qui donnerait trois lignes identiques. Et seulement après cela, supprimez-en deux.
Grâce à des transformations élémentaires, la matrice étendue du système est réduite à une forme pas à pas : ![]()
Lors de la rédaction d'une tâche dans un cahier, il est conseillé de prendre les mêmes notes au crayon pour plus de clarté.
Réécrivons le système d'équations correspondant : ![]()
Il n’y a ici aucune odeur de solution unique « ordinaire » au système. Il n’y a pas non plus de mauvaise ligne. Cela signifie qu'il s'agit du troisième cas restant : le système a une infinité de solutions. Parfois, selon la condition, il est nécessaire d'enquêter sur la compatibilité du système (c'est-à-dire prouver qu'une solution existe), vous pouvez lire à ce sujet dans le dernier paragraphe de l'article Comment trouver le rang d’une matrice ? Mais pour l’instant, revenons sur les bases :
Un ensemble infini de solutions à un système est brièvement écrit sous la forme de ce qu'on appelle solution générale du système .
On trouve la solution générale du système en utilisant l'inverse de la méthode gaussienne.
Nous devons d'abord définir quelles variables nous avons basique, et quelles variables gratuit. Vous n’avez pas à vous soucier des termes de l’algèbre linéaire, rappelez-vous simplement qu’il existe de tels termes. variables de base Et variables libres.
Les variables de base « reposent » toujours strictement sur les étapes de la matrice.
Dans cet exemple, les variables de base sont et
Les variables libres sont tout restant variables qui n’ont pas reçu de pas. Dans notre cas il y en a deux : – les variables libres.
Maintenant tu as besoin Tous variables de base exprimer Seulement par variables libres.
L’inverse de l’algorithme gaussien fonctionne traditionnellement de bas en haut.
A partir de la deuxième équation du système, nous exprimons la variable de base :
Examinons maintenant la première équation : ![]() . Nous y substituons d’abord l’expression trouvée :
. Nous y substituons d’abord l’expression trouvée : ![]()
Il reste à exprimer la variable de base en termes de variables libres : ![]()
En fin de compte, nous avons obtenu ce dont nous avions besoin - Tous les variables de base ( et ) sont exprimées Seulement par variables libres : ![]()
En fait, la solution générale est prête : ![]()
Comment écrire correctement la solution générale ?
Les variables libres sont écrites dans la solution générale « par elles-mêmes » et strictement à leur place. DANS dans ce cas les variables libres doivent être écrites en deuxième et quatrième positions : ![]() .
.
Les expressions résultantes pour les variables de base ![]() et doit évidemment être écrit en première et troisième positions :
et doit évidemment être écrit en première et troisième positions : ![]()
Donner des variables gratuites valeurs arbitraires, vous pouvez en trouver une infinité solutions privées. Les valeurs les plus populaires sont les zéros, car la solution particulière est la plus simple à obtenir. Remplaçons par la solution générale : ![]()
– solution privée.
Une autre paire intéressante est celle-là, remplaçons-les dans la solution générale : ![]()
– une autre solution privée.
Il est facile de voir que le système d’équations a une infinité de solutions(puisqu'on peut donner des variables libres n'importe lequel valeurs)
Chaque la solution particulière doit satisfaire pour chaqueéquation du système. C'est la base d'une vérification « rapide » de l'exactitude de la solution. Prenons, par exemple, une solution particulière et remplacez-la par côté gauche chaque équation du système original : ![]()
Tout doit être réuni. Et quelle que soit la solution particulière que vous recevez, tout devrait également être en accord.
Mais, à proprement parler, vérifier une solution particulière est parfois trompeur, c'est-à-dire une solution particulière peut satisfaire chaque équation du système, mais la solution générale elle-même est en réalité trouvée de manière incorrecte.
Par conséquent, la vérification de la solution générale est plus approfondie et plus fiable. Comment vérifier la solution générale résultante ![]() ?
?
Ce n'est pas difficile, mais assez fastidieux. Nous devons prendre des expressions basique variables, dans ce cas ![]() et , et remplacez-les dans le côté gauche de chaque équation du système.
et , et remplacez-les dans le côté gauche de chaque équation du système.
À gauche de la première équation du système : ![]()
À gauche de la deuxième équation du système : ![]()
Reçu partie droiteéquation originale.
Exemple 4
Résolvez le système en utilisant la méthode gaussienne. Trouvez la solution générale et deux solutions particulières. Vérifiez la solution générale. ![]()
Ceci est un exemple à résoudre par vous-même. Ici, d'ailleurs, encore une fois, le nombre d'équations est inférieur au nombre d'inconnues, ce qui signifie qu'il est immédiatement clair que le système sera soit incohérent, soit aura un nombre infini de solutions. Qu’est-ce qui est important dans le processus de décision lui-même ? Attention, et encore attention. Solution complète et réponse à la fin de la leçon.
Et quelques exemples supplémentaires pour renforcer le matériel
Exemple 5
Résoudre un système d'équations linéaires. Si le système a une infinité de solutions, trouvez deux solutions particulières et vérifiez la solution générale ![]()
Solution: Écrivons la matrice étendue du système et, à l'aide de transformations élémentaires, mettons-la sous une forme pas à pas : ![]()
(1) Ajoutez la première ligne à la deuxième ligne. À la troisième ligne, nous ajoutons la première ligne multipliée par 2. À la quatrième ligne, nous ajoutons la première ligne multipliée par 3.
(2) À la troisième ligne, nous ajoutons la deuxième ligne, multipliée par –5. À la quatrième ligne, nous ajoutons la deuxième ligne, multipliée par –7.
(3) Les troisième et quatrième lignes sont les mêmes, on en supprime une.
C'est d'une telle beauté : ![]()
Les variables de base se trouvent donc sur les marches - les variables de base.
Il n’y a qu’une seule variable libre qui n’a pas obtenu de pas :
Inverse:
Exprimons les variables de base via une variable libre :
De la troisième équation : ![]()
Considérons la deuxième équation et substituons-y l'expression trouvée : ![]()
![]()
Considérons la première équation et substituons les expressions trouvées par : ![]()
Oui, une calculatrice qui calcule des fractions ordinaires reste pratique.
La solution générale est donc : ![]()
Encore une fois, comment ça s’est passé ? La variable libre occupe seule la quatrième place qui lui revient. Les expressions résultantes pour les variables de base ont également pris leur place ordinale.
Vérifions immédiatement la solution générale. Le boulot est pour les noirs, mais je l'ai déjà fait, alors attrape-le =)
Nous substituons trois héros , , dans le côté gauche de chaque équation du système :
![]()
![]()
![]()
![]()
Les membres droits correspondants des équations sont obtenus, ainsi la solution générale est trouvée correctement.
Maintenant, à partir de la solution générale trouvée ![]() on obtient deux solutions particulières. La seule variable libre ici est le chef. Pas besoin de vous creuser la tête.
on obtient deux solutions particulières. La seule variable libre ici est le chef. Pas besoin de vous creuser la tête.
Qu'il en soit alors ![]() – solution privée.
– solution privée.
Qu'il en soit alors ![]() – une autre solution privée.
– une autre solution privée.
Répondre: Décision commune : ![]() , solutions privées :
, solutions privées : ![]() , .
, .
Je n'aurais pas dû me souvenir des Noirs... ...parce que toutes sortes de motivations sadiques me sont venues à l'esprit et je me suis souvenu du célèbre Photoshop dans lequel des hommes du Ku Klux Klan en robes blanches courent à travers le terrain après un footballeur noir. Je m'assois et je souris tranquillement. Tu sais à quel point c'est distrayant...
Beaucoup de mathématiques sont nuisibles, donc un exemple final similaire pour les résoudre vous-même.
Exemple 6
Trouver la solution générale du système d'équations linéaires. ![]()
J'ai déjà vérifié la solution générale, la réponse est fiable. Votre solution peut différer de la mienne, l'essentiel est que les solutions générales coïncident.
Beaucoup de gens ont probablement remarqué un moment désagréable dans les solutions : très souvent, en inversant la méthode de Gauss, il fallait bricoler fractions ordinaires. En pratique, c'est effectivement le cas ; les cas où il n'y a pas de fractions sont beaucoup moins fréquents. Soyez prêt mentalement et, surtout, techniquement.
Je m'attarderai sur certaines fonctionnalités de la solution qui n'ont pas été trouvées dans les exemples résolus.
La solution générale du système peut parfois inclure une ou plusieurs constantes, par exemple : . Ici l'une des variables de base est égale à un nombre constant : . Il n’y a rien d’exotique là-dedans, ça arrive. Évidemment, dans ce cas, toute solution particulière contiendra un cinq en première position.
Rarement, mais il existe des systèmes dans lesquels le nombre d'équations est supérieur au nombre de variables. La méthode gaussienne fonctionne dans les conditions les plus sévères : il faut calmement réduire la matrice étendue du système à une forme pas à pas en utilisant un algorithme standard. Un tel système peut être incohérent, peut avoir une infinité de solutions et, curieusement, peut avoir une seule solution.
Systèmes d'équations reçus large application dans le secteur économique avec modélisation mathématique divers processus. Par exemple, lors de la résolution de problèmes de gestion et de planification de la production, d'itinéraires logistiques (problème de transport) ou de placement d'équipements.
Les systèmes d'équations sont utilisés non seulement en mathématiques, mais également en physique, en chimie et en biologie, pour résoudre des problèmes liés à la détermination de la taille d'une population.
Un système d'équations linéaires est constitué de deux ou plusieurs équations à plusieurs variables pour lesquelles il est nécessaire de trouver une solution commune. Une telle séquence de nombres pour laquelle toutes les équations deviennent de vraies égalités ou prouvent que la séquence n'existe pas.
Équation linéaire
Les équations de la forme ax+by=c sont dites linéaires. Les désignations x, y sont les inconnues dont il faut trouver la valeur, b, a sont les coefficients des variables, c est le terme libre de l'équation.
Résoudre une équation en la traçant ressemblera à une ligne droite dont tous les points sont des solutions du polynôme.
Types de systèmes d'équations linéaires
Les exemples les plus simples sont considérés comme des systèmes d'équations linéaires à deux variables X et Y.
F1(x, y) = 0 et F2(x, y) = 0, où F1,2 sont des fonctions et (x, y) sont des variables de fonction.
Résoudre un système d'équations - cela signifie trouver des valeurs (x, y) auxquelles le système se transforme en une véritable égalité ou établir que les valeurs appropriées de x et y n'existent pas.
Une paire de valeurs (x, y), écrites sous la forme des coordonnées d'un point, est appelée solution d'un système d'équations linéaires.
Si les systèmes ont une solution commune ou qu’aucune solution n’existe, ils sont appelés équivalents.
Les systèmes homogènes d'équations linéaires sont des systèmes dont le membre droit est égal à zéro. Si la partie droite après le signe égal a une valeur ou est exprimée par une fonction, un tel système est hétérogène.
Le nombre de variables peut être bien supérieur à deux, nous devrions alors parler d'un exemple de système d'équations linéaires avec trois variables ou plus.
Face aux systèmes, les écoliers supposent que le nombre d’équations doit nécessairement coïncider avec le nombre d’inconnues, mais ce n’est pas le cas. Le nombre d'équations dans le système ne dépend pas des variables, il peut y en avoir autant que vous le souhaitez.
Méthodes simples et complexes pour résoudre des systèmes d'équations
Il n'existe pas de méthode analytique générale pour résoudre de tels systèmes ; toutes les méthodes sont basées sur solutions numériques. Le cours de mathématiques scolaire décrit en détail des méthodes telles que la permutation, l'addition algébrique, la substitution, ainsi que les méthodes graphiques et méthode matricielle, solution par méthode gaussienne.
La tâche principale lors de l'enseignement des méthodes de résolution est d'apprendre à analyser correctement le système et à trouver l'algorithme de solution optimal pour chaque exemple. L'essentiel n'est pas de mémoriser un système de règles et d'actions pour chaque méthode, mais de comprendre les principes d'utilisation d'une méthode particulière
Résolution d'exemples de systèmes d'équations linéaires du programme de 7e année lycée assez simple et expliqué en détail. Dans tout manuel de mathématiques, cette section reçoit suffisamment d’attention. La résolution d'exemples de systèmes d'équations linéaires par la méthode de Gauss et Cramer est étudiée plus en détail dans les premières années de l'enseignement supérieur.
Résolution de systèmes par la méthode de substitution
Les actions de la méthode de substitution visent à exprimer la valeur d'une variable en fonction de la seconde. L'expression est substituée dans l'équation restante, puis elle est réduite à une forme à une variable. L'action est répétée en fonction du nombre d'inconnues dans le système
Donnons une solution à un exemple de système d'équations linéaires de classe 7 utilisant la méthode de substitution :

Comme le montre l'exemple, la variable x a été exprimée par F(X) = 7 + Y. L'expression résultante, substituée dans la 2ème équation du système à la place de X, a permis d'obtenir une variable Y dans la 2ème équation . Solution cet exemple ne pose pas de difficultés et permet d'obtenir la valeur Y. Dernière étape Il s'agit d'une vérification des valeurs reçues.
Il n'est pas toujours possible de résoudre un exemple de système d'équations linéaires par substitution. Les équations peuvent être complexes et exprimer la variable en termes de seconde inconnue sera trop fastidieux pour des calculs ultérieurs. Lorsqu’il y a plus de 3 inconnues dans le système, la résolution par substitution est également inappropriée.
Solution d'un exemple de système d'équations inhomogènes linéaires :

Solution utilisant l'addition algébrique
Lorsqu'ils recherchent des solutions à des systèmes à l'aide de la méthode d'addition, ils effectuent l'addition et la multiplication terme par terme des équations par différents numéros. Le but ultime opérations mathématiques est une équation à une variable.

Pour les candidatures cette méthode la pratique et l’observation sont nécessaires. Résoudre un système d'équations linéaires à l'aide de la méthode d'addition lorsqu'il y a 3 variables ou plus n'est pas facile. L'addition algébrique est pratique à utiliser lorsque les équations contiennent des fractions et des décimales.
Algorithme de solution :
- Multipliez les deux côtés de l’équation par un certain nombre. À la suite de l'opération arithmétique, l'un des coefficients de la variable devrait devenir égal à 1.
- Ajoutez l'expression obtenue terme par terme et trouvez l'une des inconnues.
- Remplacez la valeur résultante dans la 2ème équation du système pour trouver la variable restante.
Méthode de solution en introduisant une nouvelle variable
Une nouvelle variable peut être introduite si le système nécessite de trouver une solution pour pas plus de deux équations ; le nombre d'inconnues ne doit pas non plus être supérieur à deux.
La méthode est utilisée pour simplifier l'une des équations en introduisant une nouvelle variable. La nouvelle équation est résolue pour l'inconnue introduite et la valeur résultante est utilisée pour déterminer la variable d'origine.
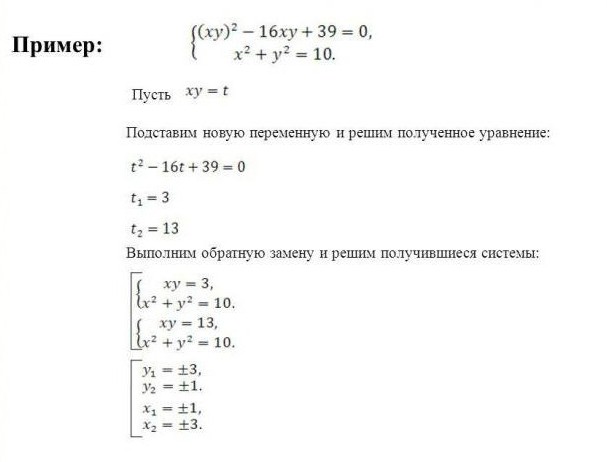
L'exemple montre qu'en introduisant une nouvelle variable t, il a été possible de réduire la 1ère équation du système à un trinôme quadratique standard. Vous pouvez résoudre un polynôme en trouvant le discriminant.
Il faut trouver la valeur discriminante par formule bien connue: D = b2 - 4*a*c, où D est le discriminant souhaité, b, a, c sont les facteurs du polynôme. DANS exemple donné a=1, b=16, c=39, donc D=100. Si le discriminant est supérieur à zéro, alors il existe deux solutions : t = -b±√D / 2*a, si le discriminant est inférieur à zéro, alors il existe une solution : x = -b / 2*a.
La solution pour les systèmes résultants est trouvée par la méthode d’addition.
Méthode visuelle pour résoudre des systèmes
Convient pour 3 systèmes d'équations. La méthode consiste à construire des graphiques de chaque équation incluse dans le système sur l'axe des coordonnées. Les coordonnées des points d'intersection des courbes seront la solution générale du système.
La méthode graphique présente un certain nombre de nuances. Examinons plusieurs exemples de résolution visuelle de systèmes d'équations linéaires.

Comme le montre l'exemple, pour chaque ligne deux points ont été construits, les valeurs de la variable x ont été choisies arbitrairement : 0 et 3. Sur la base des valeurs de x, les valeurs de y ont été trouvées : 3 et 0. Les points de coordonnées (0, 3) et (3, 0) ont été marqués sur le graphique et reliés par une ligne.
Les étapes doivent être répétées pour la deuxième équation. Le point d'intersection des droites est la solution du système.
L'exemple suivant nécessite de trouver solution graphique systèmes d'équations linéaires : 0,5x-y+2=0 et 0,5x-y-1=0.

Comme le montre l'exemple, le système n'a pas de solution, car les graphiques sont parallèles et ne se coupent pas sur toute leur longueur.

Les systèmes des exemples 2 et 3 sont similaires, mais une fois construits, il devient évident que leurs solutions sont différentes. Il faut rappeler qu’il n’est pas toujours possible de dire si un système a une solution ou non ; il faut toujours construire un graphe.
La matrice et ses variétés
Les matrices sont utilisées pour écrire de manière concise un système d’équations linéaires. Une matrice est un tableau type spécial rempli de chiffres. n*m a n lignes et m colonnes.
Une matrice est carrée lorsque le nombre de colonnes et de lignes sont égaux. Une matrice-vecteur est une matrice d'une colonne avec une infinité numéro possible lignes. Une matrice avec des uns le long d’une des diagonales et d’autres éléments nuls est appelée identité.
Une matrice inverse est une matrice lorsqu'elle est multipliée par laquelle celle d'origine se transforme en une matrice unitaire ; une telle matrice n'existe que pour la matrice carrée d'origine.
Règles pour convertir un système d'équations en matrice
En ce qui concerne les systèmes d'équations, les coefficients et les termes libres des équations sont écrits sous forme de nombres matriciels ; une équation est une ligne de la matrice.
Une ligne matricielle est dite non nulle si au moins un élément de la ligne est non nul. Par conséquent, si dans l'une des équations le nombre de variables diffère, il est alors nécessaire d'entrer zéro à la place de l'inconnue manquante.
Les colonnes de la matrice doivent correspondre strictement aux variables. Cela signifie que les coefficients de la variable x ne peuvent être écrits que dans une colonne, par exemple la première, le coefficient de l'inconnu y - uniquement dans la seconde.
Lors de la multiplication d'une matrice, tous les éléments de la matrice sont multipliés séquentiellement par un nombre.
Options pour trouver la matrice inverse
La formule pour trouver la matrice inverse est assez simple : K -1 = 1 / |K|, où K -1 est la matrice inverse, et |K| est le déterminant de la matrice. |K| ne doit pas être égal à zéro, alors le système a une solution.
Le déterminant se calcule facilement pour une matrice deux par deux : il suffit de multiplier les éléments diagonaux les uns par les autres. Pour l'option « trois par trois », il existe une formule |K|=a 1 b 2 c 3 + a 1 b 3 c 2 + a 3 b 1 c 2 + a 2 b 3 c 1 + a 2 b 1 c 3 + une 3 b 2 c 1 . Vous pouvez utiliser la formule ou vous rappeler que vous devez prendre un élément de chaque ligne et de chaque colonne afin que le nombre de colonnes et de lignes d'éléments ne se répète pas dans le travail.
Résolution d'exemples de systèmes d'équations linéaires à l'aide de la méthode matricielle
La méthode matricielle de recherche d'une solution vous permet de réduire les saisies fastidieuses lors de la résolution de systèmes comportant un grand nombre de variables et d'équations.

Dans l'exemple, a nm sont les coefficients des équations, la matrice est un vecteur x n sont des variables et b n sont des termes libres.


Résolution de systèmes par la méthode gaussienne
En mathématiques supérieures, la méthode gaussienne est étudiée avec la méthode Cramer, et le processus de recherche de solutions aux systèmes est appelé méthode de solution Gauss-Cramer. Ces méthodes sont utilisées pour trouver systèmes variables avec un grand nombre d'équations linéaires.
La méthode de Gauss est très similaire aux solutions par substitution et addition algébrique, mais est plus systématique. Dans le cours scolaire, la solution par la méthode gaussienne est utilisée pour les systèmes de 3 et 4 équations. Le but de la méthode est de réduire le système à la forme d'un trapèze inversé. Au moyen de transformations algébriques et de substitutions, la valeur d'une variable se retrouve dans l'une des équations du système. La deuxième équation est une expression à 2 inconnues, tandis que 3 et 4 sont respectivement à 3 et 4 variables.
Après avoir amené le système à la forme décrite, la solution supplémentaire est réduite à la substitution séquentielle de variables connues dans les équations du système.
Dans les manuels scolaires de la 7e année, un exemple de solution par la méthode Gauss est décrit comme suit :

Comme le montre l'exemple, à l'étape (3), deux équations ont été obtenues : 3x 3 -2x 4 =11 et 3x 3 +2x 4 =7. La résolution de l'une des équations vous permettra de connaître l'une des variables x n.

Le théorème 5, mentionné dans le texte, stipule que si l'une des équations du système est remplacée par une équivalente, alors le système résultant sera également équivalent à celui d'origine.
La méthode Gauss est difficile à comprendre pour les étudiants lycée, mais c'est l'un des plus façons intéressantes développer l'ingéniosité des enfants qui étudient dans le cadre du programme étude approfondie dans les cours de mathématiques et de physique.
Pour faciliter l'enregistrement, les calculs sont généralement effectués comme suit :

Les coefficients des équations et termes libres sont écrits sous la forme d'une matrice, où chaque ligne de la matrice correspond à l'une des équations du système. sépare le côté gauche de l’équation du côté droit. Les chiffres romains indiquent le nombre d'équations du système.
Notez d’abord la matrice à travailler, puis toutes les actions réalisées avec l’une des lignes. La matrice résultante est écrite après le signe "flèche" et les opérations algébriques nécessaires sont poursuivies jusqu'à ce que le résultat soit obtenu.
Le résultat devrait être une matrice dans laquelle l'une des diagonales est égale à 1 et tous les autres coefficients sont égaux à zéro, c'est-à-dire que la matrice est réduite à une forme unitaire. Il ne faut pas oublier d'effectuer des calculs avec des nombres des deux côtés de l'équation.
Cette méthode d'enregistrement est moins lourde et permet de ne pas se laisser distraire par la liste de nombreuses inconnues.
L'utilisation gratuite de n'importe quelle méthode de résolution nécessitera de la prudence et une certaine expérience. Toutes les méthodes ne sont pas de nature appliquée. Certaines méthodes pour trouver des solutions sont plus préférables dans un domaine particulier de l'activité humaine, tandis que d'autres existent à des fins pédagogiques.