Знаходження векторного добутку у прямокутній системі координат. Векторний витвір векторів. Змішаний твір векторів
Yandex.RTB R-A-339285-1Перед тим, як дати поняття векторного твору, звернемося до питання орієнтації впорядкованої трійки векторів a → , b → , c → у тривимірному просторі.
Відкладемо спочатку вектори a → , b → , c → від однієї точки. Орієнтація трійки a → , b → , c → буває правою чи лівою, залежно від напрямку самого вектора c → . Від того, в яку сторону здійснюється найкоротший поворот від вектора a → до b → з кінця вектора c → буде визначено вид трійки a → b → c → .
Якщо найкоротший поворот здійснюється проти годинникової стрілки, то трійка векторів a → , b → , c → називається правою, якщо за годинниковою стрілкою – лівий.
Далі візьмемо два не коллінеарні вектори a → і b → . Відкладемо потім від точки A вектори AB → = a → і A C → b → . Побудуємо вектор A D → = c → , який одночасно перпендикулярний і A B → і A C → . Таким чином, при побудові самого вектора A D → = c → ми можемо вчинити подвійно, поставивши йому або один напрямок, або протилежний (дивіться ілюстрацію).

Упорядкована трійка векторів a → , b → , c → може бути, як ми з'ясували правою чи лівою залежно від напрямку вектора.
Зі сказаного вище можемо ввести визначення векторного твору. Дане визначеннядається для двох векторів, визначених у прямокутній системі координат тривимірного простору.
Визначення 1
Векторним твором двох векторів a → та b → називатимемо такий вектор заданий у прямокутній системі координат тривимірного простору такий, що:
- якщо вектори a → та b → колінеарні, він буде нульовим;
- він буде перпендикулярний вектору a → і вектору b → тобто. ∠ a → c → ∠ b → c → = π 2 ;
- його довжина визначається за формулою: c → = a → b → sin ∠ a → , b → ;
- трійка векторів a → , b → , c → має таку саму орієнтацію, як і за дана системакоординат.
Векторний витвірвекторів a → та b → має таке позначення: a → × b → .
Координати векторного твору
Оскільки будь-який вектор має певні координати в системі координат, можна ввести друге визначення векторного твору, яке дозволить знаходити його координати за заданими координатами векторів.
Визначення 2
У прямокутній системі координат тривимірного простору векторним твором двох векторів a → = (a x ; a y ; a z) і b → = (b x ; b y ; b z) називають вектор c → = a → × b → = (a y · b z - a z · b y) · i → + (a z · b x - a x · b z) · j → + (a x · b y - a y · b x) · k → , де i → j → k → є координатними векторами.
Векторний твір можна представити як визначник квадратної матрицітретього порядку, де перший рядок є вектори орти i → , j → , k → , другий рядок містить координати вектора a → , а третій – координати вектора b → у заданій прямокутній системі координат, даний визначник матриці виглядає так: c → = a → × b → = i → j → k → a x a y z b x b y b z
Розклавши даний визначник по елементам першого рядка, отримаємо рівність: = → → → → → → → → → → → → → → → → → → → → → → → (a y · b z - a z · b y) · i → + (a z · b x - a x · b z) · j → + (a x · b y - a y · b x) · k →
Властивості векторного твору
Відомо, що векторний добуток у координатах представляється як визначник матриці c → = a → × b → = i → j → k → властивостей визначника матрицівиводяться такі властивості векторного твору:
- антикомутативність a → × b → = - b → × a →;
- дистрибутивність a (1) → + a (2) → × b = a (1) → × b → + a (2) → × b → або a → × b (1) → + b (2) → = a → × b (1) → + a → × b (2) → ;
- асоціативність λ · a → × b → = λ · a → × b → або a → × (λ · b →) = λ · a → × b → , де λ - довільне дійсне число.
Ці властивості мають нескладні докази.
Наприклад можемо довести властивість антикомутативності векторного твору.
Доказ антикомутативності
За визначенням a → x b → = i → j → k → a x a y z b x b y b z і b → x a → = i → j → k → b x b y b a x a y a z . А якщо два рядки матриці переставити місцями, то значення визначника матриці має змінюватися на протилежне, отже, a → x b → = i → j → k → a x a y z b x b y b = - i → j → та доводить антикомутативність векторного твору.
Векторний твір – приклади та рішення
Найчастіше зустрічаються три типи завдань.
У задачах першого типу зазвичай задані довжини двох векторів та кут між ними, а потрібно знайти довжину векторного твору. У цьому випадку користуються наступною формулою c → = a → b → sin ∠ a → , b → .
Приклад 1
Знайдіть довжину векторного добутку векторів a → та b → , якщо відомо a → = 3 , b → = 5 , ∠ a → , b → = π 4 .
Рішення
За допомогою визначення довжини векторного добутку векторів a → і b → розв'яжемо дану задачу: a → × b → = a → b → sin ∠ a → b → = 3 · 5 · sin π 4 = 15 2 2 .
Відповідь: 15 2 2 .
Завдання другого типу мають зв'язок із координатами векторів, у яких векторний твір, його довжина тощо. шукаються через відомі координати заданих векторів a → = (a x ; a y ; a z) і b → = (b x ; b y ; b z) .
Для такого типу завдань можна вирішити масу варіантів завдань. Наприклад, можуть бути задані не координати векторів a → і b → , а їх розкладання координатним векторамвиду b → = b x · i → + b y · j → + b z · k → і c → = a → ? вектори a → та b → можуть бути задані координатами точок їх початку та кінця.
Розглянемо такі приклади.
Приклад 2
У прямокутній системі координат задані два вектори a → = (2; 1; - 3), b → = (0; - 1; 1). Знайдіть їхній векторний твір.
Рішення
За другим визначенням знайдемо векторний добуток двох векторів у заданих координатах: a → x b → = (a y · b z - a z · b y) · i → + (a z · b x - a x · b z) · j → + (a x · b y - a y · b x) · k → = = (1 · 1 - (- 3) · (- 1)) · i → + ((- 3) · 0 - 2 · 1) · j → + (2 · (- 1) - 1 · 0) · k → = = - 2 i → - 2 j → - 2 k → .
Якщо записати векторний добуток через визначник матриці, то рішення даного прикладувиглядає так: a → x b → = i → j → k → a x a y z b x b y b z = i → j → k → 2 1 - 3 0 - 1 1 = - 2 i → - 2 j → - 2 k → .
Відповідь: a → × b → = - 2 i → - 2 j → - 2 k → .
Приклад 3
Знайдіть довжину векторного добутку векторів i → - j → та i → + j → + k → , де i → , j → , k → - орти прямокутної декартової системи координат.
Рішення
Для початку знайдемо координати заданого векторного твору i → - j → × i → + j → + k → у цій прямокутній системі координат.
Відомо, що вектори i → - j → і i → + j → + k → мають координати (1; - 1; 0) і (1; 1; 1) відповідно. Знайдемо довжину векторного твору за допомогою визначника матриці, тоді маємо i → - j → × i → + j → + k → = i → j → k → 1 - 1 0 1 1 1 = - i → - j → + 2 k → .
Отже, векторний твір i → - j → × i → + j → + k → має координати (- 1; - 1; 2) у заданій системі координат.
Довжину векторного твору знайдемо за формулою (див. розділ довжини вектора): i → - j → × i → + j → + k → = - 1 2 + - 1 2 + 2 2 = 6 .
Відповідь: i → -j → × i → + j → + k → = 6 . .
Приклад 4
У прямокутній декартовій системі координат задані координати трьох точок A (1, 0, 1), B (0, 2, 3), C (1, 4, 2). Знайдіть якийсь вектор, перпендикулярний A B → і A C → одночасно.
Рішення
Вектори A B → і A C → мають наступні координати (-1; 2; 2) і (0; 4; 1) відповідно. Знайшовши векторний добуток векторів A B → і A C → , очевидно, що він є перпендикулярним вектором за визначенням і до A B → і до A C →, тобто є рішенням нашої задачі. Знайдемо його A B → A C → = i → j → k → - 1 2 2 0 4 1 = - 6 i → + j → - 4 k → .
Відповідь: - 6 i → + j → - 4 k → . - один із перпендикулярних векторів.
Завдання третього типу орієнтовані використання властивостей векторного добутку векторів. Після застосування яких будемо отримувати рішення заданого завдання.
Приклад 5
Вектори a → та b → перпендикулярні та їх довжини рівні відповідно 3 та 4 . Знайдіть довжину векторного твору 3 · a → - b → × a → - 2 · b → = 3 · a → × a → - 2 · b → + - b → × a → - 2 · b → = = 3 · a → * a → + 3 · a → × - 2 · b → + - b → × a → + - b → × - 2 · b → .
Рішення
За властивістю дистрибутивності векторного твору ми можемо записати 3 · a → - b → × a → - 2 · b → = 3 · a → × a → - 2 · b → + - b → × a → - 2 · b → = = 3 · a → × a → + 3 · a → × - 2 · b → + - b → × a → + - b → × - 2 · b →
За якістю асоціативності винесемо числові коефіцієнти за знак векторних творів в останньому виразі: 3 · a → × a → + 3 · a → = 3 · a → × a → + 3 · (-2) · a → × b → + (- 1) · b → × a → + (- 1) · (- 2) · b → × b → = = 3 · a → × a → - 6 · a → × b → - b → × a → + 2 · b → × b →
Векторні твори a → × a → і b → × b → рівні 0, оскільки a → × a → = a → · a → · sin 0 = 0 і b → × b → = b → 0 , тоді 3 · a → ? .
З антикомутативності векторного твору випливає - 6 · a → × b → - b → × a → = - 6 · a → × b → - (- 1) · a → × b → = - 5 · a → × b → . .
Скориставшись властивостями векторного твору, отримуємо рівність 3 · a → - b → × a → - 2 · b → = = - 5 · a → × b → .
За умовами вектори a → та b → перпендикулярні, тобто кут між ними дорівнює π 2 . Тепер залишається лише підставити знайдені значення у відповідні формули: 3 · a → - b → ? → · sin (a → , b →) = 5 · 3 · 4 · sin π 2 = 60 .
Відповідь: 3 · a → - b → × a → - 2 · b → = 60 .
Довжина векторного добутку векторів з орпеділення дорівнює a → × b → = a → b → sin ∠ a → , b → . Оскільки вже відомо (зі шкільного курсу), площа трикутника дорівнює половині добутку довжин двох сторін помножене на синус кута між цими сторонами. Отже, довжина векторного добутку дорівнює площі паралелограма - подвоєного трикутника, а саме добутку сторін у вигляді векторів a → і b → відкладені від однієї точки на синус кута між ними sin ∠ a → , b → .
Це і є геометричне значення векторного твору.

Фізичний зміст векторного твору
У механіці, одному з розділів фізики завдяки векторному твору можна визначити момент сили щодо точки простору.
Визначення 3
Під моментом сили F → , прикладеної до точки B , щодо точки A розумітимемо наступний векторний твір A B → × F → .
Якщо ви помітили помилку в тексті, будь ласка, виділіть її та натисніть Ctrl+Enter
Одиничний вектор- це векторабсолютна величина (модуль) якого дорівнює одиниці. Для позначення одиничного вектора ми будемо використовувати нижній індекс е. Так, якщо заданий вектор а, то його одиничним вектором буде ае. Цей одиничний вектор спрямований туди, куди спрямований і сам вектор а, та її модуль дорівнює одиниці, тобто а е = 1.
Очевидно, а= а · ае (а - модуль вектора а). Це випливає з правила, яким виконується операція множення скаляра на вектор .
Поодинокі векторичасто пов'язують із координатними осями системи координат (зокрема, з осями декартової системи координат). Напрями цих векторівзбігаються з напрямками відповідних осей, які початку часто поєднують з початком системи координат.
Нагадаю, що декартовою системою координату просторі традиційно називається трійка взаємно перпендикулярних осей, що перетинаються у точці, яка називається початком координат. Координатні осі зазвичай позначають буквами X, Y, Z і називають відповідно віссю абсцис, віссю ординат і віссю аплікат. Сам Декарт користувався лише однією віссю, де відкладалися абсциси. Заслуга використання системиосей належить його учням. Тому фраза декартова система координатісторично хибна. Краще говорити прямокутна система координатабо ортогональна система координат. Тим не менш, змінювати традиції ми не станемо і надалі вважатимемо, що декартова та прямокутна (ортогональна) системи координат – це те саме.
Одиничний вектор, спрямований уздовж осі Х, позначається i, одиничний вектор, спрямований уздовж осі Y, позначається j, а одиничний вектор, спрямований уздовж осі Z, позначається k. Вектори i, j, kназиваються ортами(рис. 12, зліва), вони мають одиничні модулі, тобто
i = 1, j = 1, k = 1.
Осі та орти прямокутної системи координату деяких випадках мають інші назви та позначення. Так, вісь абсцис X може називатися дотичною віссю, а її орт позначається τ (грецька рядкова літера тау), вісь ординат - віссю нормалі, її орт позначається n, вісь аплікат - віссю бінормалі, її орт позначається b. Навіщо змінювати назви, якщо суть залишається такою самою?
Річ у тім, що, наприклад, у механіці щодо руху тіл прямокутна система координат використовується дуже часто. Так от, якщо сама система координат нерухома, а зміна координат об'єкта, що рухається, відстежується в цій нерухомій системі, то зазвичай осі позначають X, Y, Z, а їх ортивідповідно i, j, k.
Але нерідко, коли об'єкт рухається якоюсь криволінійною траєкторією (наприклад, по колу) буває зручніше розглядати механічні процесиу системі координат, що рухається з цим об'єктом. Саме для такої системи координат, що рухається, і використовуються інші назви осей та їх ортів. Просто так заведено. У цьому випадку вісь X направляють по дотичній траєкторії в тій її точці, в якій в даний момент цей об'єкт знаходиться. І тоді цю вісь називають вже не віссю X, а дотичною віссю, а її орт позначають уже не i, а τ . Вісь Y направляють по радіусу кривизни траєкторії (у разі руху по колу - до центру кола). А оскільки радіус перпендикулярний дотичній, то вісь називають віссю нормалі (перпендикуляр і нормаль - це те саме). Орт цієї осі позначають вже не j, а n. Третя вісь (колишня Z) перпендикулярна двом попереднім. Це - бінормаль з ортом b(Рис. 12, праворуч). До речі, у цьому випадку таку прямокутну системукоординатчасто називають «природною» чи натуральною.
Визначення Упорядковану сукупність (x 1 , x 2 , ... , x n) n дійсних чисел називають n-вимірним вектором, а числа x i (i = ) - компонентами,або координатами,
приклад. Якщо, наприклад, деякий автомобільний завод має випустити за зміну 50 легкових автомобілів, 100 вантажних, 10 автобусів, 50 комплектів запчастин для легкових автомобілів та 150 комплектів для вантажних автомобілів та автобусів, то виробничу програму цього заводу можна записати у вигляді вектора (50, 100, 10, 50, 150), що має п'ять компонент.
Позначення. Вектори позначають жирними малими літерамиабо літерами з рисою або стрілкою нагорі, наприклад, aабо. Два вектори називаються рівнимиякщо вони мають однакову кількість компонентів і їх відповідні компоненти рівні.
Компоненти вектора не можна міняти місцями, наприклад (3, 2, 5, 0, 1)та (2, 3, 5, 0, 1) різні вектори.
Операції над векторами.Твором
x= (x 1, x 2, ..., x n) на дійсне числоλ називається векторλ x= (λ x 1, x 2, ..., x n).
Сумоюx= (x 1, x 2, ..., x n) і y= (y 1 , y 2 , ... ,y n) називається вектор x + y= (x 1 + y 1, x 2 + y 2, ..., x n + + y n).
Векторні простір. N -мірний векторний простір R n визначається як безліч всіх n-мірних векторів, для яких визначено операції множення на дійсні числа та додавання.
Економічна ілюстрація. Економічна ілюстрація n-вимірного векторного простору: простір благ (товарів). Під товаромми розумітимемо деяке благо чи послугу, що надійшли у продаж у певний час у певному місці. Припустимо, що є кінцеве число готівкових товарів n; кількості кожного з них, придбані споживачем, характеризуються набором товарів
x= (x 1, x 2, ..., x n),
де через x i позначається кількість i-го блага, набутого споживачем. Будемо вважати, що всі товари мають властивість довільної ділимості, так що може бути куплено будь-яку невід'ємну кількість кожного з них. Тоді всі можливі набори товарів є векторами простору товарів C = ( x= (x 1, x 2, ..., x n) x i ≥ 0, i = ).
Лінійна незалежність.
Система e 1 , e 2 , ... , e m n-вимірних векторів називається лінійно залежноюякщо знайдуться такі числаλ 1 , λ 2 , ... , λ m , з яких хоча б одне відмінно від нуля, що виконується рівністьλ 1 e 1 + λ 2 e 2 +... + λ m e m = 0; в іншому випадку дана система векторів називається лінійно незалежною, тобто зазначена рівність можлива лише у разі, коли все ![]() . Геометричний зміст лінійної залежностівекторів у R 3 , що інтерпретуються як спрямовані відрізки, пояснюють такі теореми.
. Геометричний зміст лінійної залежностівекторів у R 3 , що інтерпретуються як спрямовані відрізки, пояснюють такі теореми.
Теорема 1. Система, що складається з одного вектора, лінійно залежить тоді і тільки тоді, коли цей вектор нульовий.
Теорема 2. Для того щоб два вектори були лінійно залежні, необхідно і достатньо, щоб вони були колінеарні (паралельні).
Теорема 3 . Для того щоб три вектори були лінійно залежні, необхідно і достатньо, щоб вони були компланарні (лежали в одній площині).
Ліва та права трійки векторів. Трійка некомпланарних векторів a, b, cназивається правою, якщо спостерігачеві з їхнього загального початку обхід кінців векторів a, b, cу вказаному порядку здається таким, що відбувається за годинниковою стрілкою. В іншому випадку a, b, c -ліва трійка. Усі праві (або ліві) трійки векторів називаються однаково орієнтованими.
Базис та координати. Трійка e 1, e 2 , e 3 некомпланарних векторів у R 3 називається базисом, а самі вектори e 1, e 2 , e 3 - базисними. Будь-який вектор aможе бути єдиним чином розкладений за базовими векторами, тобто представлений у вигляді
а= x 1 e 1 + x 2 e 2 + x 3 e 3, (1.1)
числа x 1 , x 2 , x 3 у розкладанні (1.1) називаються координатамиaу базисі e 1, e 2 , e 3 і позначаються a(x 1, x 2, x 3).
Ортонормований базис. Якщо вектори e 1, e 2 , e 3 попарно перпендикулярні і довжина кожного з них дорівнює одиниці, то базис називається ортонормованим, а координати x 1 x 2 x 3 - прямокутними.Базисні вектори ортонормованого базису позначатимемо i, j, k.
Припускатимемо, що в просторі R 3 обрана права система декартових прямокутних координат {0, i, j, k}.
Векторний витвір. Векторним твором ана вектор bназивається вектор c, який визначається такими трьома умовами:
1. Довжина вектора cчисельно дорівнює площі паралелограма, побудованого на векторах aі b,тобто.
c=
|a||b| sin ( a^b).
2. Вектор cперпендикулярний до кожного з векторів aі b.
3. Вектори a, bі c, взяті у вказаному порядку, утворюють праву трійку
Для векторного твору cвводиться позначення c =[ab] або
c = a
× b.
Якщо вектори aі bколінеарні, то sin( a^b) = 0 і [ ab] = 0, зокрема, [ aa] = 0. Векторні твори ортів: [ ij]=k, [jk] = i, [ki]=j.
Якщо вектори aі bзадані у базисі i, j, kкоординатами a(a 1 , a 2 , a 3), b(b 1, b 2, b 3), то

Змішаний твір. Якщо векторний твір двох векторів аі bскалярно множиться на третій вектор c,то такий твір трьох векторів називається змішаним творомі позначається символом a b c.
Якщо вектори a, bі cу базисі i, j, kзадані своїми координатами
a(a 1 , a 2 , a 3), b(b 1, b 2, b 3), c(c 1 , c 2 , c 3), то
 .
.
Змішаний твір має просте геометричне тлумачення - це скаляр, абсолютної величинидорівнює обсягу паралелепіпеда, побудованого на трьох даних векторах.
Якщо вектори утворюють праву трійку, їх змішаний твірє число позитивне, що дорівнює зазначеному обсягу; якщо ж трійка a, b, c -ліва, то a b c<0 и V = - a b c, отже V =|a b c|.
Координати векторів, які у задачах першого розділу, передбачаються заданими щодо правого ортонормованого базису. Поодинокий вектор, спрямований вектор а,позначається символом ао. Символом r=ОМпозначається радіус-вектор точки М, символами а, АВ або|а|, | АВ|позначаються модулі векторів аі АВ.
приклад 1.2. Знайдіть кут між векторами a= 2m+4nі b= m-n, де mі n -одиничні вектори та кут між mі nдорівнює 120 о.
Рішення. Маємо: cos φ = ab/ab, ab =(2m+4n) (m-n) = 2m 2 - 4n 2 +2mn=
= 2 - 4+2cos120 o = - 2 + 2(-0.5) = -3; a = ; a 2 = (2m+4n) (2m+4n) =
= 4m 2 +16mn+16n 2 = 4+16(-0.5)+16=12, отже a = . b = ; b 2 =
= (m-n)(m-n) = m 2 -2mn+n 2 =
1-2(-0.5)+1 = 3, отже b = . Остаточно маємо: cosφ = = -1/2, φ = 120 o .
приклад 1.3.Знаючи вектори AB(-3,-2,6) та BC(-2,4,4), обчисліть довжину висоти AD трикутника ABC.
Рішення. Позначаючи площу трикутника ABC через S, отримаємо:
S = 1/2 BC AD. Тоді AD=2S/BC, BC= = ![]() = 6,
= 6,
S = 1/2 | AB ×AC|.
AC=AB+BCотже, вектор ACмає координати
.
.
приклад 1.4 . Дано два вектори a(11,10,2) та b(4,0,3). Знайдіть одиничний вектор c,ортогональний вектор aі bі спрямований так, щоб упорядкована трійка векторів a, b, cбула правою.
Рішення.Позначимо координати вектора cщодо даного правого ортонормованого базису через x, y, z.
Оскільки c ⊥ a, c ⊥b, то ca= 0, cb= 0. За умовою завдання потрібно, щоб c = 1 і a b c >0.
Маємо систему рівнянь для знаходження x,y,z: 11x +10y + 2z = 0, 4x + 3z = 0, x 2 + y 2 + z 2 = 0.
З першого та другого рівнянь системи отримаємо z = -4/3 x, y = -5/6 x. Підставляючи y та z у третє рівняння, матимемо: x 2 = 36/125, звідки
x =±
. Використовуючи умову a b c > 0, отримаємо нерівність

З урахуванням виразів для z та y перепишемо отриману нерівність у вигляді: 625/6 x > 0, звідки випливає, що x>0. Отже, x = , y = -, z = -.
Визначення. Векторним твором вектора а (множинне) на колінеарний йому вектор (множник) називається третій вектор з (твір), який будується наступним чином:
1) його модуль чисельно дорівнює площіпаралелограма на рис. 155), побудованого на векторах тобто він дорівнює напрям перпендикулярно площині згаданого паралелограма;
3) при цьому напрям вектора з вибирається (з двох можливих) так, щоб вектори складали праву систему (§ 110).
Позначення: або
Доповнення до визначення. Якщо вектори колінеарні, то фігурі вважаючи її (умовно) паралелограмом, звичайно приписати нульову площу. Тому векторний добуток колінеарних векторів вважається рівним нуль-вектору.

Оскільки нуль-вектор можна приписати будь-який напрям, ця угода не суперечить пунктам 2 і 3 визначення.
Зауваження 1. У терміні «векторний твір» перше слово вказує на те, що результат дії є вектором (на противагу скалярному твору; пор. § 104, зауваження 1).
Приклад 1. Знайти векторний твір, де основні вектори правої системи координат (рис. 156).
1. Оскільки довжини основних векторів дорівнюють одиниці масштабу, то площа паралелограма (квадрату) чисельно дорівнює одиниці. Отже, модуль векторного добутку дорівнює одиниці.
2. Так як перпендикуляр до площини є ось те шуканий векторний твір є вектор, колінеарний вектор; бо обидва вони мають модуль 1, то шуканий векторний добуток дорівнює або k, або -k.
3. З цих двох можливих векторів треба вибрати перший, тому що вектори до утворюють праву систему (а вектори ліву).
Приклад 2. Знайти векторний твір
Рішення. Як приклад 1, укладаємо, що вектор дорівнює або k, або -k. Але тепер треба вибрати -k, тому що вектори утворюють праву систему (а вектори ліву). Отже,
Приклад 3. Вектори мають довжини, що дорівнює 80 і 50 см, і утворюють кут 30°. Взявши за одиницю довжини метр, знайти довжину векторного твору

Рішення. Площа паралелограма, побудованого на векторах, дорівнює Довжина шуканого векторного твору дорівнює
Приклад 4. Знайти довжину векторного добутку тих самих векторів, взявши за одиницю довжини сантиметр.
Рішення. Оскільки площа паралелограма, побудованого векторах дорівнює то довжина векторного добутку дорівнює 2000 див, тобто.
З порівняння прикладів 3 і 4 видно, що довжина вектора залежить від довжин сомножителей але й від вибору одиниці довжини.
Фізичний зміст векторного твору.З численних фізичних величин, що зображуються векторним твором, розглянемо лише момент сили.
Нехай А є точка докладання сили Моментом сили щодо точки О називається векторний твір Оскільки модуль цього векторного твору чисельно дорівнює площі паралелограма (рис. 157), то модуль моменту дорівнює добутку основи на висоту, тобто силі, помноженій на відстань від точки О до прямої, вздовж якої діє сила.
У механіці доводиться, що з рівноваги твердого тіланеобхідно, щоб дорівнювала нулю як сума векторів , що представляють сили, прикладені до тіла, а й сума моментів сил. У тому випадку, коли всі сили паралельні одній площині, складання векторів, що представляють моменти, можна замінити додаванням і відніманням їх модулів. Але за довільних напрямів сил така заміна неможлива. Відповідно до цього векторний добуток визначається саме як вектор, а не як число.

7.1. Визначення векторного твору
Три некомпланарних вектори a, b і с, взяті в зазначеному порядку, утворюють праву трійку, якщо з кінця третього вектора з найкоротший поворот від першого вектора а до другого вектора b видно таким, що відбувається проти годинникової стрілки, і ліву, якщо за годинниковою (див. рис. 16).
Векторним добутком вектора на вектор b називається вектор з , який:
1. Перпендикулярний векторам a і b, тобто з ^ а і с ^ b;
2. Має довжину, чисельно рівну площі паралелограма, побудованого на векторах а іbяк у сторонах (див. рис. 17), тобто.
3. Вектори a, b і з утворюють праву трійку.


Векторний твір позначається а х b або [а, b]. З визначення векторного твору безпосередньо випливають такі співвідношення між ортами i jі k(див. рис. 18):
i x j = k , j x k = i , k x i = j .
Доведемо, наприклад, що i хj = k.
1) k ^ i, k ^ j;
2) |k |=1, але | i x j| = | i | |J | sin(90°)=1;
3) вектори i, j і kутворюють праву трійку (рис. 16).
7.2. Властивості векторного твору
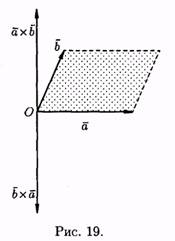
1. При перестановці співмножників векторне твір змінює знак, тобто. а хb = (b хa) (див. рис. 19).
Вектори а хb і b ха колінеарні, мають однакові модулі (площа паралелограма залишається незмінною), але протилежно спрямовані (трійки а, b, а хb і a, b, b x a протилежної орієнтації). Стало бути a xb = -(b xa).
2. Векторний твір має поєднану властивість щодо скалярного множника, тобто l (а хb) = (l а) х b = а х (l b).
Нехай l>0. Вектор l (а хb) перпендикулярний векторам а та b. Вектор ( lа) х bтакож перпендикулярний векторам а і b(Вектори а, lа лежать у одній площині). Значить, вектори l(а хb) та ( lа) х bколінеарні. Очевидно, що й напрямки збігаються. Мають однакову довжину:
Тому l(a хb) = lа хb. Аналогічно доводиться при l<0.
3. Два ненульові вектори а і bколінеарні тоді й тільки тоді, коли їхній векторний твір дорівнює нульовому вектору, тобто а ||b<=>а хb = 0.

Зокрема, i * i = j * j = k * k = 0 .
4. Векторний твір має розподільну властивість:
(a + b )хс = а хс + bхс.
Приймемо без підтвердження.
7.3. Вираз векторного твору через координати
Ми використовуватимемо таблицю векторного твору векторів i , jі k:

якщо напрям найкоротшого шляху від першого вектора до другого збігається з напрямком стрілки, твір дорівнює третьому вектору, а то й збігається - третій вектор береться зі знаком «мінус».
Нехай задані два вектори а = а х i + a y j+a z kі b = b x i+b y j+b z k. Знайдемо векторний твір цих векторів, перемножуючи їх як багаточлени (відповідно до властивостей векторного твору):

![]()
Отриману формулу можна записати ще коротше:

оскільки права частина рівності (7.1) відповідає розкладу визначника третього порядку за елементами першого рядка.Рівність (7.2) легко запам'ятовується.
7.4. Деякі програми векторного твору
Встановлення колінеарності векторів

Знаходження площі паралелограма та трикутника
Згідно з визначенням векторного твору векторів аі b |а хb | =|а | * | b | sin g, т. е. S пар = | а x b |. І, отже, D S = 1/2 | а х b |
Визначення моменту сили щодо точки
Нехай у точці А прикладена сила F = АВі нехай Про- Деяка точка простору (див. рис. 20).

З фізики відомо, що моментом сили F щодо точки Проназивається вектор М,який проходить через точку Прота:
1) перпендикулярний площині, що проходить через точки О, А, В;
2) чисельно дорівнює добутку сили на плече
3) утворює праву трійку з векторами ОА та A .
Отже, М = ОА х F .
Знаходження лінійної швидкості обертання
Швидкість vточки М твердого тіла, що обертається з кутовою швидкістю wнавколо нерухомої осі визначається формулою Ейлера v = w хr , де r = ОМ , де О-деяка нерухома точка осі (див. рис. 21).