Матричний метод. Лінійні рівняння. Вирішення систем лінійних рівнянь матричним методом
Це поняття, що узагальнює всі можливі операції, які виробляються з матрицями. Математична матриця – таблиця елементів. Про таку таблицю, де mрядків та nстовпців, кажуть, що це матриця має розмірність mна n.
Загальний вигляд матриці:
Для рішення матрицьнеобхідно розуміти, що таке матриця та знати основні її параметри. Основні елементи матриці:
- Головна діагональ, що складається з елементів а 11, а 22 …..а mn.
- Побічна діагональ, що складається з елементів а 1n, а 2n-1 …..а m1.
Основні види матриць:
- Квадратна - така матриця, де число рядків = числу стовпців ( m=n).
- Нульова – де всі елементи матриці = 0.
- Транспонована матриця - матриця У, яка була отримана з вихідної матриці Aшляхом заміни рядків на стовпці.
- Поодинока - всі елементи головної діагоналі = 1, решта = 0.
- Зворотна матриця - матриця, при множенні на яку вихідна матриця дає в результаті поодиноку матрицю.
Матриця може бути симетричною щодо головної та побічної діагоналі. Тобто, якщо а 12 = а 21, а 13 = а 31, .... а 23 = а 32 …. а m-1n = а mn-1то матриця симетрична щодо головної діагоналі. Симетричними можуть лише квадратні матриці.
Методи розв'язання матриць.
Майже все методи вирішення матриціполягають у знаходженні її визначника n-го порядку і більшість їх досить громіздкі. Щоб знайти визначник 2-го та 3-го порядку є інші, більш раціональні способи.
Знаходження визначників 2-го порядку.
Для обчислення визначника матриці А 2го порядку, необхідно від твору елементів головної діагоналі відняти добуток елементів побічної діагоналі:
![]()
Методи знаходження визначників 3-го порядку.
Нижче наведено правила знаходження визначника 3го порядку.
Спрощено правило трикутника, як одного з методів вирішення матриць, можна зобразити таким чином:

Іншими словами, добуток елементів у першому визначнику, які з'єднані прямими, береться зі знаком "+"; так само, для 2-го визначника - відповідні твори беруться зі знаком "-", тобто за такою схемою:
При рішенні матриць правилом Саррюса, праворуч від визначника дописують перші 2 стовпці та твори відповідних елементів на головній діагоналі та на діагоналях, які їй паралельні, беруть зі знаком "+"; а твори відповідних елементів побічної діагоналі та діагоналей, які їй паралельні, зі знаком "-":

Розкладання визначника по рядку чи стовпцю під час вирішення матриць.
Визначник дорівнює сумітворів елементів рядка визначника з їхньої алгебраїчні доповнення. Зазвичай вибирають той рядок / стовпець, в якому є нулі. Рядок або стовпець, по якому ведеться розкладання, будуть позначати стрілкою.
Приведення визначника до трикутного вигляду під час вирішення матриць.
При рішенні матрицьЗ допомогою приведення визначника до трикутному виду, працюють так: з допомогою найпростіших перетворень над рядками чи стовпцями, визначник стає трикутного вигляду і тоді його значення, відповідно до властивостями визначника, дорівнюватиме добутку елементів, які стоять на головній діагоналі.
Теорема Лапласа під час вирішення матриць.
Вирішуючи матриці за теоремою Лапласа, необхідно знати безпосередньо саму теорему. Теорема Лапласа: Нехай Δ - це визначник n-го порядку. Вибираємо в ньому будь-які kрядків (або стовпців), за умови k≤ n - 1. У такому разі сума творів усіх мінорів k-го порядку, що містяться у вибраних kрядках (стовпцях), на їх алгебраїчні доповнення дорівнюватиме визначнику.
Вирішення зворотної матриці.
Послідовність дій для рішення зворотної матриці:
- Зрозуміти, чи квадратна дана матриця. У разі негативної відповіді стає ясно, що зворотної матриці не може бути.
- Обчислюємо додатки алгебри.
- Складаємо союзну (взаємну, приєднану) матрицю C.
- Складаємо зворотну матрицю з алгебраїчних доповнень: всі елементи приєднаної матриці Cділимо на визначник початкової матриці. Підсумкова матриця буде шуканою зворотною матрицею щодо заданої.
- Перевіряємо виконану роботу: множимо матрицю початкову та отриману матриці, результатом має стати одинична матриця.
Вирішення систем матриць.
Для рішення систем матрицьнайчастіше використовують метод Гаусса.
Метод Гауса – це стандартний спосіб вирішення систем лінійних алгебраїчних рівнянь(СЛАУ) і він полягає в тому, що послідовно виключаються змінні, тобто за допомогою елементарних змін систему рівнянь доводять до еквівалентної системи трикутного вигляду і з неї, послідовно, починаючи з останніх (за номером), знаходять кожен елемент системи.
Метод Гаусає найбільш універсальним і найкращим інструментомдля знаходження рішення матриць. Якщо у системи безліч рішень або система є несумісною, то її не можна вирішувати за правилом Крамера і матричним методом.
Метод Гауса передбачає також прямий (приведення розширеної матриці до ступінчастого вигляду, тобто отримання нулів під головною діагоналлю) і зворотний (отримання нулів над головною діагоналлю розширеної матриці) ходи. Прямий хід є метод Гаусса, зворотний - метод Гаусса-Жордана. Метод Гауса-Жордана відрізняється від методу Гауса лише послідовністю виключення змінних.
Рівняння взагалі, лінійні рівняння алгебри та їх системи, а також методи їх вирішення займають в математиці, як теоретичної, так і прикладної, особливе місце.
Це з тим обставиною, що переважна більшість фізичних, економічних, технічних і навіть педагогічних завданьможуть бути описані та вирішені за допомогою різноманітних рівнянь та їх систем. У Останнім часомОсобливу популярність серед дослідників, науковців та практиків набуло математичне моделювання практично у всіх предметних галузях, що пояснюється очевидними його перевагами перед іншими відомими та апробованими методами дослідження об'єктів. різної природи, зокрема, так званих, складних систем. Існує велика різноманітність різних визначеньматематичної моделі, даних вченими в різні часи, але на наш погляд, найвдаліше, це наступне твердження. Математична модель- Це ідея, виражена рівнянням. Таким чином, уміння складати та вирішувати рівняння та їх системи – невід'ємна характеристика сучасного фахівця.
Для вирішення систем лінійних рівнянь алгебри найчастіше використовуються методи: Крамера, Жордана-Гаусса і матричний метод.
Матричний метод рішення - метод рішення за допомогою зворотної матриці систем лінійних рівнянь алгебри з ненульовим визначником.
Якщо виписати коефіцієнти при невідомих величинах xi в матрицю A, невідомі величини зібрати у вектор стовпець X, а вільні члени у вектор стовпець B, то систему лінійних рівнянь алгебри можна записати у вигляді наступного матричного рівняння A · X = B, яке має єдине рішення тільки тоді, коли визначник матриці A не дорівнюватиме нулю. При цьому розв'язання системи рівнянь можна знайти наступним способом X = A-1 · B, де A -1 - зворотна матриця.
Матричний метод рішення полягає в наступному.
Нехай дана система лінійних рівняньз nневідомими:
Її можна переписати в матричній формі: AX = B, де A- основна матриця системи, Bі X- стовпці вільних членів та рішень системи відповідно:

Помножимо це матричне рівняннязліва на A-1 - матрицю, зворотну до матриці A: A -1 (AX) = A -1 B
Так як A -1 A = E, отримуємо X= A -1 B. Права частинацього рівняння дасть стовпець рішень вихідної системи. Умовою застосування даного методу(як і взагалі існування рішення не однорідної системилінійних рівнянь з числом рівнянь, що дорівнює кількості невідомих) є невиродженість матриці A. Необхідним та достатньою умовоюцього є нерівність нулю визначника матриці A: det A≠ 0.
Для однорідної системи лінійних рівнянь, тобто коли вектор B = 0 , дійсно зворотне правило: система AX = 0 має нетривіальне (тобто не нульове) рішення тільки якщо det A= 0. Така зв'язок між рішеннями однорідних і неоднорідних систем лінійних рівнянь зветься альтернативи Фредгольма.
приклад розв'язання неоднорідної системи лінійних рівнянь алгебри.

Переконаємося в тому, що визначник матриці, складений з коефіцієнтів при невідомих системах лінійних рівнянь алгебри не дорівнює нулю.

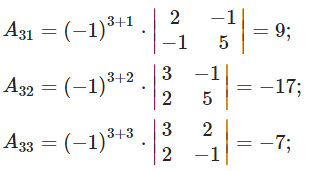
Наступним кроком буде обчислення додатків алгебри для елементів матриці, що складається з коефіцієнтів при невідомих. Вони знадобляться для знаходження зворотної матриці.

Розглянемо систему лінійних рівнянь алгебри(СЛАУ) щодо nневідомих x 1 , x 2 , ..., x n :
Ця система в "згорнутому" вигляді може бути записана так:
S n i=1 a ij x j = b i , i=1,2, ..., n.
Відповідно до правила множення матриць розглянута система лінійних рівнянь може бути записана в матричній формі Ax=b, де
 ,
,.
,
,.
Матриця A, стовпцями якої є коефіцієнти за відповідних невідомих, а рядками - коефіцієнти за невідомих у відповідному рівнянні називається матрицею системи. Матриця-стовпець b, елементами якої є праві частини рівнянь системи, називається матрицею правої частини або просто правою частиною системи. Матриця-стовпець x , елементи якої - шукані невідомі, називається рішенням системи.
Система лінійних рівнянь алгебри, записана у вигляді Ax=b, є матричним рівнянням.
Якщо матриця системи невироджена, то вона має зворотна матриця і тоді рішення системи Ax=bдається формулою:
x=A -1 b.
прикладВирішити систему  матричним способом.
матричним способом.
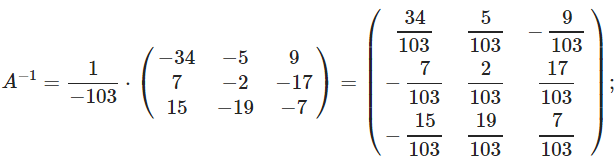
Рішеннязнайдемо зворотну матрицю для матриці коефіцієнтів системи

Обчислимо визначник, розкладаючи по першому рядку:

Оскільки Δ ≠ 0 , то A -1 існує.

Зворотна матриця знайдена правильно.
Знайдемо рішення системи 
Отже, x 1 = 1, x 2 = 2, x 3 = 3 .
Перевірка: 
7. Теорема Кронекера-Капеллі про спільність системи лінійних рівнянь алгебри.
Система лінійних рівняньмає вигляд:
a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2 (5.1)
a m1 x 1 + a m1 x 2 +... + a mn x n = b m.
Тут а i j та b i (i = ; j = ) - задані, а x j - невідомі дійсні числа. Використовуючи поняття твору матриць, можна переписати систему (5.1) як:
де A = (а i j) - матриця, що складається з коефіцієнтів при невідомих системах (5.1), яка називається матрицею системи, X = (x 1 , x 2 ,..., x n) T , B = (b 1 , b 2 ,..., b m) T - вектори-стовпці, складені відповідно з невідомих x j і з вільних членів b i .
Упорядкована сукупність nдійсних чисел (c 1 , c 2 ,..., c n) називається рішенням системи(5.1), якщо в результаті підстановки цих чисел замість відповідних змінних x 1 , x 2 ,..., x n кожне рівняння системи перетворюється на арифметичну тотожність; інакше кажучи, якщо існує вектор C= (c 1 , c 2 ,..., c n) T такий, що AC B.
Система (5.1) називається спільної,або можна розв'язати,якщо вона має принаймні одне рішення. Система називається несумісний,або нерозв'язноюякщо вона не має рішень.
 ,
,
утворена шляхом приписування праворуч до матриці A стовпця вільних членів, називається розширеною матрицею системи.
Питання спільності системи (5.1) вирішується наступною теоремою.
Теорема Кронекера-Капеллі . Система лінійних рівнянь спільна і тоді, коли ранги матриць A іA збігаються, тобто. r(A) = r(A) = r.
Для безлічі М рішень системи (5.1) є три можливості:
1) M = (у цьому випадку система несумісна);
2) M складається з одного елемента, тобто. система має єдине рішення (у цьому випадку система називається певною);
3) M складається з більш ніж одного елемента (тоді система називається невизначеною). У третьому випадку система (5.1) має безліч рішень.
Система має єдине рішення лише у тому випадку, коли r(A) = n. При цьому кількість рівнянь - не менше числаневідомих (mn); якщо m>n, то m-n рівняньє наслідками інших. Якщо 0 Для вирішення довільної системи лінійних рівнянь потрібно вміти розв'язувати системи, в яких число рівнянь дорівнює числу невідомих, - так звані системи крамерівського типу: a 11 x 1 + a 12 x 2 +... + a 1n x n = b 1 , a 21 x 1 + a 22 x 2 +... + a 2n x n = b 2 (5.3) ...
... ... ...
... ... a n1 x 1 + a n1 x 2 +... + a nn x n = b n. Системи (5.3) вирішуються одним із таких способів: 1) методом Гаусса, або методом виключення невідомих; 2) за формулами Крамера; 3) матричним способом. Приклад 2.12. Дослідити систему рівнянь та вирішити її, якщо вона спільна: 5x 1 - x 2 + 2x 3 + x 4 = 7, 2x 1 + x 2 + 4x 3 - 2x 4 = 1, x 1 – 3x 2 – 6x 3 + 5x 4 = 0. Рішення.Виписуємо розширену матрицю системи:
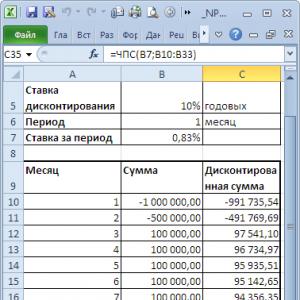
Обчислимо ранг основної матриці системи. Очевидно, що, наприклад, мінор другого порядку в лівому верхньому кутку = 7 0 0; містять його мінори третього порядку дорівнюють нулю: Отже, ранг основного матриці системи дорівнює 2, тобто. r(A) = 2. Для обчислення рангу розширеної матриці A розглянемо облямовуючий мінор отже, ранг розширеної матриці r(A) = 3. Оскільки r(A) r(A), то система несумісна. Матричний метод рішення СЛАУзастосовують до розв'язання систем рівнянь, які мають кількість рівнянь відповідає кількості невідомих. Метод найкраще застосовувати для вирішення систем низького порядку. Матричний метод розв'язання систем лінійних рівнянь ґрунтується на застосуванні властивостей множення матриць. Цей спосіб, іншими словами метод зворотної матриці,називають так, тому що рішення зводиться до звичайного матричного рівняння, для вирішення якого потрібно знайти зворотну матрицю. Матричний метод вирішенняСЛАУ з визначником, який більший або менший за нуль полягає в наступному: Припустимо, є СЛУ (система лінійних рівнянь) з nневідомими (над довільним полем): Значить, її легко перевести в матричну форму: AX=B, де A- Основна матриця системи, Bі X- Стовпці вільних членів та рішень системи відповідно: Помножимо це матричне рівняння зліва на A −1- Зворотну матрицю до матриці A: A −1 (AX)=A −1 B. Т.к. A −1 A=Eотже, X=A −1 B. Права частина рівняння дає стовпець рішень початкової системи. Умовою застосування матричного методу є невиродженість матриці A. Необхідною та достатньою умовою цього є нерівність нулю визначника матриці A: detA≠0. Для однорідної системи лінійних рівнянь, тобто. якщо вектор B=0, Виконується зворотне правило: у системи AX=0є нетривіальне (тобто не рівне нулю) рішення лише коли detA=0. Цей зв'язок між рішеннями однорідних та неоднорідних систем лінійних рівнянь називається альтернатива Фредґольму. Т.ч., рішення СЛАУ матричним методом проводиться за формулою Відомо, що у квадратної матриці Апорядку nна nє зворотна матриця A −1лише у тому випадку, якщо її визначник ненульовий. Таким чином, систему nлінійних алгебраїчних рівнянь з nневідомими вирішуємо матричним методом лише у випадку, якщо визначник основної матриці системи не дорівнює нулю. Незважаючи на те, що є обмеження можливості застосування такого методу та існують складності обчислень при великих значеннях коефіцієнтів та систем високого порядку, метод можна легко реалізувати на ЕОМ. Для початку перевіримо, чи нулю не дорівнює визначник матриці коефіцієнтів у невідомих СЛАУ. Тепер знаходимо союзну матрицю, транспонуємо її та підставляємо у формулу для визначення зворотної матриці. Підставляємо змінні у формулу: Тепер знаходимо невідомі, перемножуючи зворотну матрицю та стовпчик вільних членів. Отже, x=2; y=1; z=4. При переході від звичайного виду СЛАУ до матричної форми будьте уважними з порядком невідомих змінних рівнянь системи. Наприклад: НЕ МОЖНА записати як: Необхідно, для початку, упорядкувати невідомі змінні в кадом рівнянні системи і лише після цього переходити до матричного запису: Крім того, потрібно бути уважними з позначенням невідомих змінних, x 1 , x 2 , …, x nможуть виявитися інші літери. Наприклад: у матричній формі записуємо так: Матричним способом краще вирішувати системи лінійних рівнянь, у яких кількість рівнянь збігається з числом невідомих змінних і визначник основної матриці системи не дорівнює нулю. Коли в системі більше 3-х рівнянь, на знаходження зворотної матриці потрібно більше обчислювальних зусиль, тому в цьому випадку доцільно використовувати для вирішення метод Гаусса. (Іноді цей спосіб називають ще матричним методом або методом зворотної матриці) вимагає попереднього ознайомлення з таким поняттям як матрична форма запису СЛАУ. Метод зворотної матриці призначений для вирішення тих систем лінійних рівнянь алгебри, у яких визначник матриці системи відмінний від нуля. Звичайно, при цьому мається на увазі, що матриця системи квадратна (поняття визначника існує тільки для квадратних матриць). Суть методу зворотної матриці можна виразити у трьох пунктах: Будь-яку СЛАУ можна записати в матричній формі як $A\cdot X=B$, де $A$ - матриця системи, $B$ - матриця вільних членів, $X$ - матриця невідомих. Нехай матриця $A^(-1)$ існує. Помножимо обидві частини рівності $A\cdot X=B$ на матрицю $A^(-1)$ зліва: $$A^(-1)\cdot A\cdot X=A^(-1)\cdot B.$$ Оскільки $A^(-1)\cdot A=E$ ($E$ - одинична матриця), то записана вище рівність стане такою: $$E\cdot X=A^(-1)\cdot B.$$ Оскільки $E\cdot X=X$, то: $$X=A^(-1)\cdot B.$$ Приклад №1 Вирішити СЛАУ $ \left \( \begin(aligned) & -5x_1+7x_2=29;\\ & 9x_1+8x_2=-11. \end(aligned) \right.$ за допомогою зворотної матриці. $$ A=\left(\begin(array) (cc) -5 & 7\\ 9 & 8 \end(array)\right);\; B=\left(\begin(array) (c) 29\-11 \end(array)\right);\; X=\left(\begin(array) (c) x_1\x_2 \end(array)\right). $$ Знайдемо зворотний матрицю до матриці системи, тобто. обчислимо $A^(-1)$. У прикладі №2 $$ A^(-1)=-\frac(1)(103)\cdot\left(\begin(array)(cc) 8 & -7\\ -9 & -5\end(array)\right) . $$ Тепер підставимо всі три матриці ($X$, $A^(-1)$, $B$) у рівність $X=A^(-1)\cdot B$. Потім виконаємо множення матриць $$ \left(\begin(array) (c) x_1\\ x_2 \end(array)\right)= -\frac(1)(103)\cdot\left(\begin(array)(cc) 8 & -7\ -9 & -5\end(array)\right)\cdot \left(\begin(array) (c) 29\\ -11 \end(array)\right)=\\ =-\frac (1)(103)\cdot \left(\begin(array) (c) 8\cdot 29+(-7)\cdot (-11)\ -9\cdot 29+(-5)\cdot (- 11) \end(array)\right)= -\frac(1)(103)\cdot \left(\begin(array) (c) 309\\ -206 \end(array)\right)=\left( \begin(array) (c) -3\ 2\end(array)\right). $$ Отже, ми здобули рівність $\left(\begin(array) (c) x_1\\ x_2 \end(array)\right)=\left(\begin(array) (c) -3\\ 2\end(array ) \ right) $. З цієї рівності маємо: $x_1=-3$, $x_2=2$. Відповідь: $x_1=-3$, $x_2=2$. Приклад №2 Вирішити СЛАУ $ \left\(\begin(aligned) & x_1+7x_2+3x_3=-1;\\ & -4x_1+9x_2+4x_3=0;\\ & 3x_2+2x_3=6. \end(aligned)\right . $ методом зворотної матриці. Запишемо матрицю системи $A$, матрицю вільних членів $B$ та матрицю невідомих $X$. $$ A=\left(\begin(array) (ccc) 1 & 7 & 3\\ -4 & 9 & 4 \\0 & 3 & 2\end(array)\right);\; B=\left(\begin(array) (c) -1\0\\6\end(array)\right);\; X=\left(\begin(array) (c) x_1\x_2 \x_3 \end(array)\right). $$ Тепер настала черга знайти зворотну матрицю до матриці системи, тобто. знайти $A^(-1)$. У прикладі №3 на сторінці, присвяченій знаходження зворотних матриць, зворотну матрицю було вже знайдено. Скористайтеся готовим результатом і запишемо $A^(-1)$: $$ A^(-1)=\frac(1)(26)\cdot \left(\begin(array) (ccc) 6 & -5 & 1 \\ 8 & 2 & -16 \\ -12 & - 3 & 37\end(array) \right). $$ Тепер підставимо всі три матриці ($X$, $A^(-1)$, $B$) у рівність $X=A^(-1)\cdot B$, після чого виконаємо множення матриць у правій частині даної рівності. $$ \left(\begin(array) (c) x_1\\ x_2 \\ x_3 \end(array)\right)= \frac(1)(26)\cdot \left(\begin(array) (ccc) 6 & -5 & 1 \\ 8 & 2 & -16 \\ -12 & -3 & 37\end(array) \right)\cdot \left(\begin(array) (c) -1\\0\ \6\end(array)\right)=\\ =\frac(1)(26)\cdot \left(\begin(array) (c) 6\cdot(-1)+(-5)\cdot 0 +1cdot 6 8cdot (-1)+2cdot 0+(-16)cdot 6 -12cdot (-1)+(-3)cdot 0+37cdot 6 \end(array)\right)=\frac(1)(26)\cdot \left(\begin(array) (c) 0\-104\\234\end(array)\right)=\left( \begin(array) (c) 0\-4\\9\end(array)\right) $$ Отже, ми здобули рівність $\left(\begin(array) (c) x_1\\ x_2 \\ x_3 \end(array)\right)=\left(\begin(array) (c) 0\\-4\ \ 9 \ end (array) \ right) $. З цієї рівності маємо: $x_1=0$, $x_2=-4$, $x_3=9$. .
.



![]() . Або рішення СЛАУ знаходять за допомогою зворотної матриці A −1.
. Або рішення СЛАУ знаходять за допомогою зворотної матриці A −1.Приклад розв'язання неоднорідної СЛАУ.